Quando você anexa uma Nuvem de pontos que requer pré-processamento, esta converte 5 a 8 vezes mais rápido no BricsCAD® V22 em comparação com o V21.
Para pré-processar uma nuvem de pontos, você pode usar o comando ANEXARNUVEMPONTOS ou o Gerenciador de Referência de Nuvem de Pontos, que é aberto com o comando NUVEMPONTOSREFERENCIA.
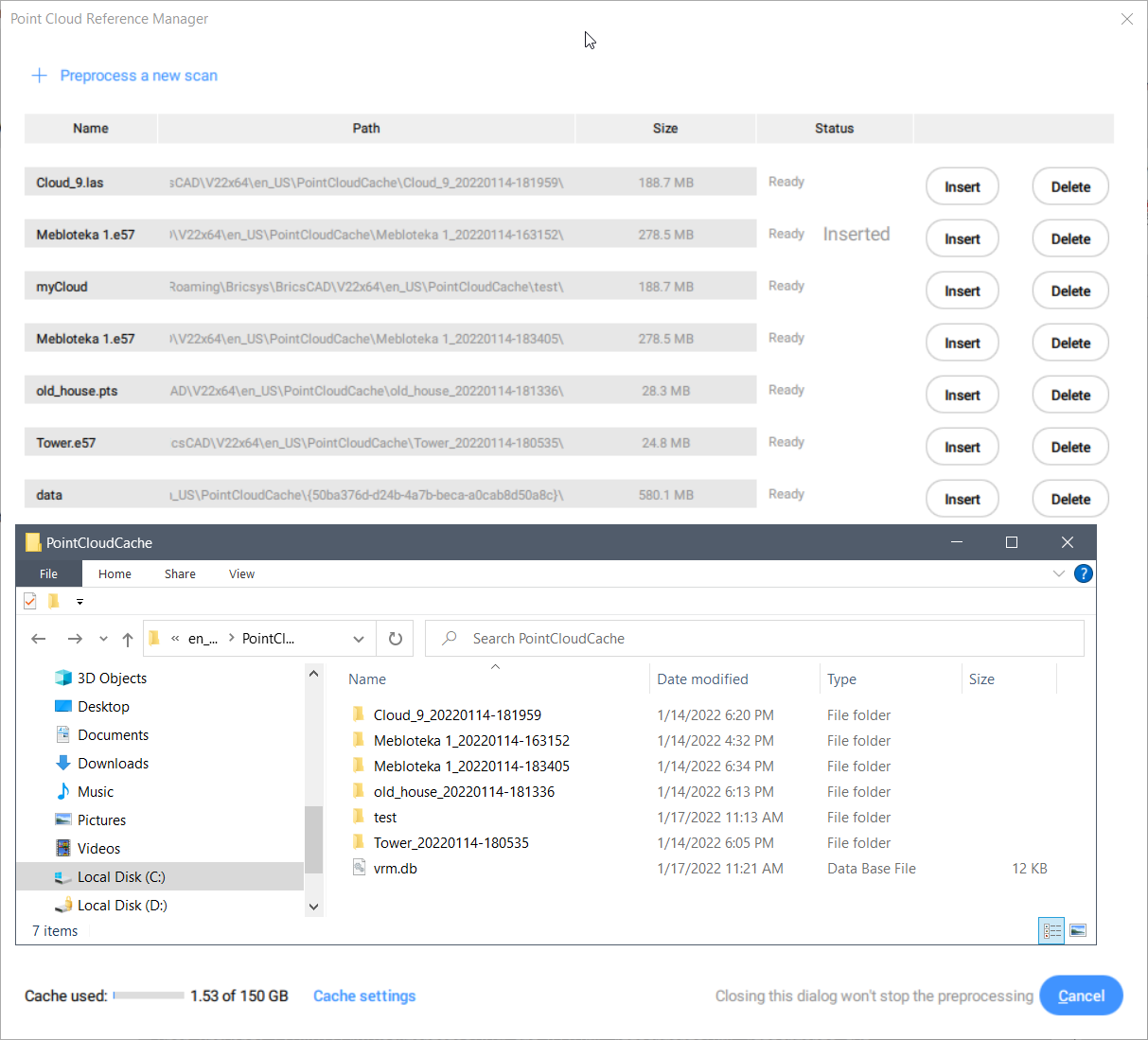
Você pode encontrar o arquivo de log em C:\Users\USERNAME\AppData\Roaming\Bricsys\BricsCAD\V22x64\en_US\PointCloudCache\Folder_for_processed_pointcloud, somente se esse caminho estiver definido na variável de sistema POINTCLOUDCACHEFOLDER. Dentro dessa pasta, você pode ver o estado atual do processamento.
Note: O arquivo de log é mais útil para solução de problemas, enquanto o Gerenciador de Referência de Nuvem de Pontos é o local dedicado para monitorar a progressão do pré-processamento.
Note: Alguns arquivos de entrada incomuns de nuvem de pontos, como arquivos *.LAS com layout de coluna não-padrão ou etiquetas geográficas não-padrão, não são automaticamente pré-processados de forma correta. No entanto, há também um pré-processador executável no shell (aviso de Comando), de nome preprocessor.exe, na pasta de instalação do BricsCAD® que permite especificar layout de coluna não-padrão e/ou tags geográficas não-padrão (-w skip). O pré-processador em shell usa a mesma biblioteca sob o capô, mas expõe algumas opções manuais que não são usadas automaticamente pelo BricsCAD®. Para saber mais sobre as opções, execute o executável do pré-processador sem argumentos em uma janela de shell (aviso de Comando) do sistema operacional. Um resumo de utilização será impresso. Para obter informações mais detalhadas, consulte Como usar o preprocessor.exe para ignorar as tags GeoTIFF durante o pré-processamento de dados de nuvem de ponto *.LAS, *.LAZ não-padrão?
Note: Qualquer subpasta com dados de cache de nuvem de pontos previamente pré-processados (de outra pasta de cache de nuvem de pontos do BricsCAD ou pré-processada com o executável em shell preprocessor.exe) pode ser copiada na pasta especificada pela variável de sistema POINTCLOUDCACHEFOLDER (valor padrão: C:\Users\USERNAME\AppData\Roaming\Bricsys\BricsCAD\V22x64\en_US\PointCloudCache) e estará disponível na próxima vez que você abrir o Gerenciador de Referência de Nuvem de Pontos. Para cada subpasta na pasta de cache de nuvem de pontos, há um item na caixa de diálogo de referência:
Alinhamento
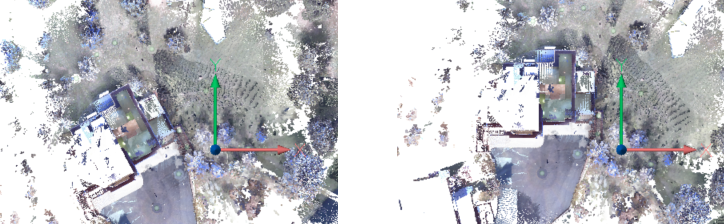
O comando NUVEMPONTOSALINHAR rotaciona automaticamente uma nuvem de pontos para alinhá-la de forma ideal com os eixos X e Y (os pontos devem estar em planos verticais (por exemplo. paredes). Para determinar o melhor alinhamento, este pode analisar a nuvem de pontos inteira, ou você pode especificar a área mais relevante.
Visualizador de Bolha
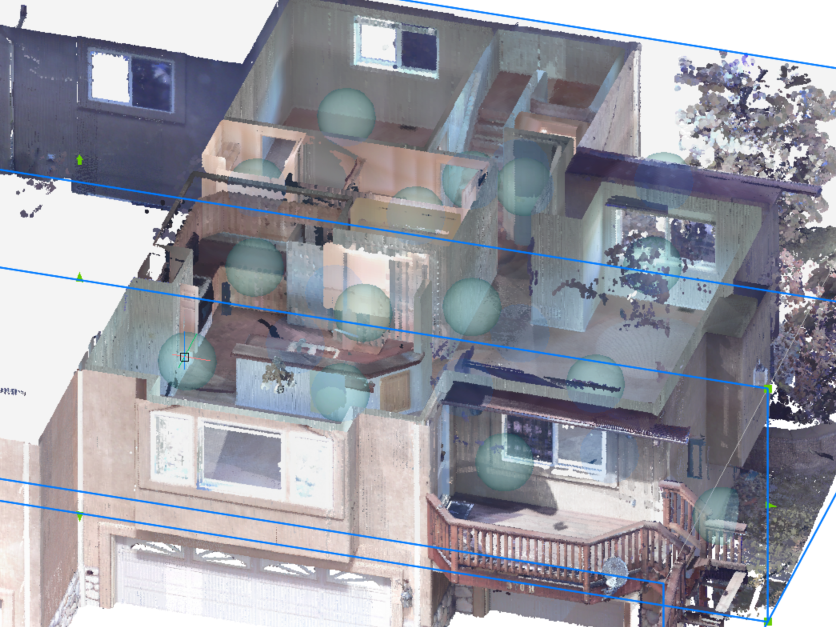
A nuvem de pontos exibe bolhas em todos os locais em que foi feita a digitalização pelo scanner, se:
os dados foram capturados a partir de um conjunto de posições de varredura fixas (fique em algum lugar fixo e capture milhões de pontos digitalizados de um único local de scanner de origem);
o formato de dados permite armazenar essa informação.
Nesses locais, você vai experimentar as representações visuais mais realistas.
Exemplo de situação em que (1) ou (2) não está satisfeito:
O mapeamento móvel (ex., escaneamento por caminhamento ou a partir de dispositivos aéreos) não tem posições de varredura fixas, e portanto não tem Bolhas.
Além disso, certos formatos de arquivo, como o *.las, não têm a possibilidade de armazenar posições de digitalização, mesmo quando os dados foram capturados de posições de varredura fixas. Então, também não é possível criar bolhas
Note: As bolhas de nuvem de pontos só são criadas quando os pontos são digitalizados com scanners estáticos e os pontos são agrupados para cada localização do scanner. Os arquivos de formatos *.LAS e *.PTS não contêm informações do scanner, portanto, não podem produzir bolhas de nuvem de pontos.
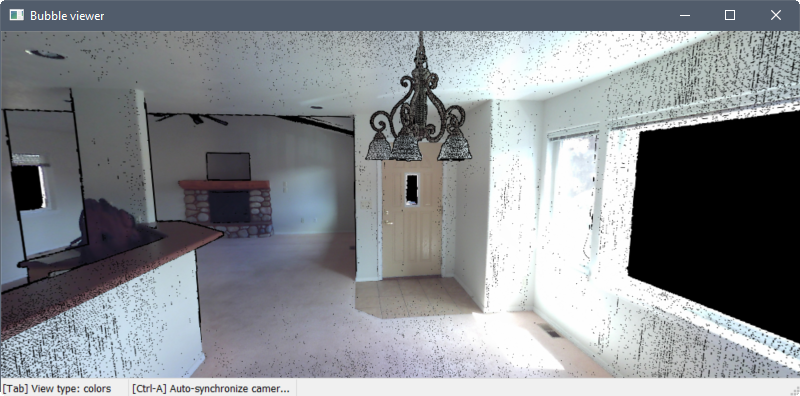
Clique-duplo em uma das bolhas no Model Space para abrir o visualizador da Bolha. Você pode pressionar o botão médio e mover o mouse para ver a nuvem de pontos em qualquer direção, a partir do local da digitalização. Você também pode aumentar e diminuir o zoom usando a rodinha do mouse.
Pressione a tecla Tab para circular entre três diferentes modos visuais.
O primeiro modo exibe os pontos como suas cores reais ou em escala de cinza, dependendo de como os dados foram escanerizados.
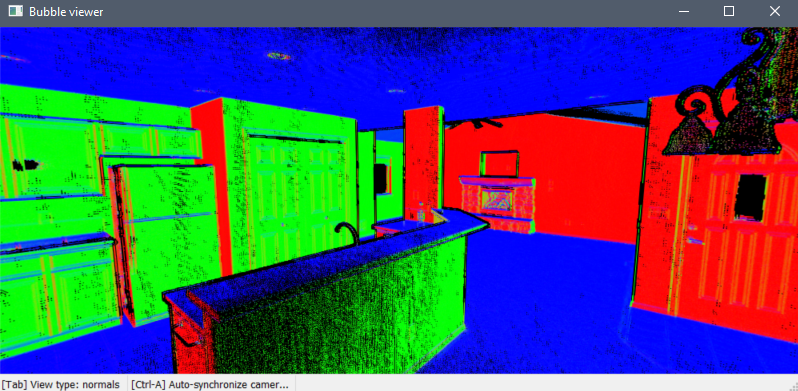
O segundo modo exibe os pontos como vermelho, verde ou azul de acordo com seus vetores normais. As cores correspondem aos eixos do UCS.
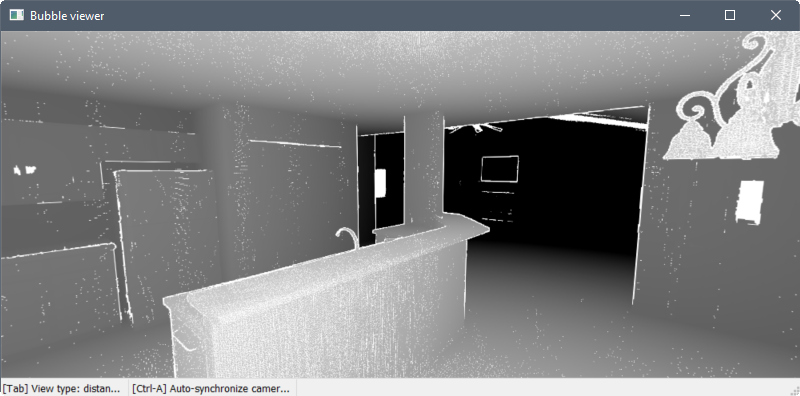
O terceiro modo exibe os pontos de claro a escuro à medida que a distância do local da varredura vai aumentando.
Você pode facilmente sincronizar a vista do desenho, para igualar àquela do visualizador da Bolha, pressionando Ctrl+A.
Note: Você pode desligar as bolhas de nuvem de pontos do Model Space, e também alterar seu tamanho no painel Propriedades.
Snaps de entidade
O novo snap da entidade para Ponto Mais próximo da Nuvem de Pontos melhora significativamente sua capacidade de selecionar pontos relevantes em nuvem de pontos. Este usa um cilindro imaginário a partir do ponto de vista atual, em direção ao cursor.
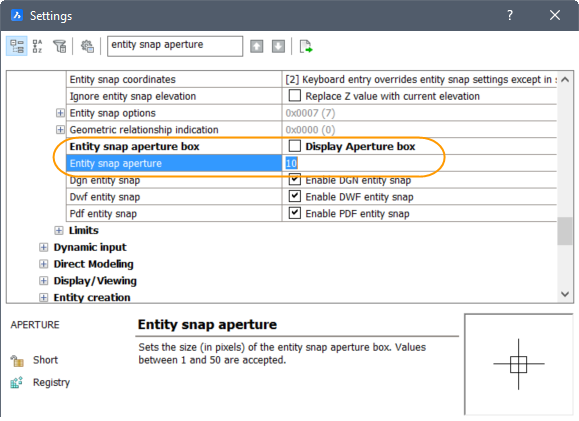
O raio do cilindro imaginário é definido pela configuração da caixa de abertura de snap a Entidade.
Note: O resultado é o ponto no cilindro imaginário que está mais próximo da câmera.
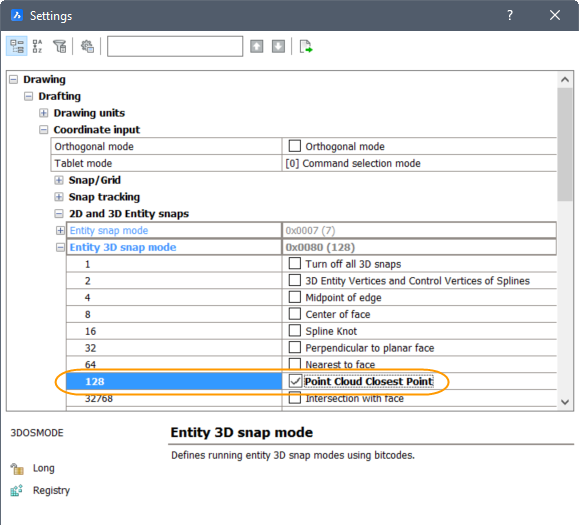
Ative o novo snap de entidade Ponto Mais próximo da Nuvem de pontos junto com outros snaps de entidade 3D nos menus de Snap a Entidade, barra de ferramentas e configurações.
Note: Certifique-se de que apenas o bitcode 128 da variável de sistema 3DOSMODE esteja definido.
Exportar
O novo comando NUVEMPONTOSEXPORTAR permite exportar uma seleção recortada de uma nuvem de pontos, para um arquivo *.PTS.
Detecção de Piso
Os Planos de Corte também funcionam em Nuvens de pontos. Você pode usá-los para mostrar partes das Nuvens de pontos. A diferença entre recortes de Nuvem de pontos e Planos de Corte é que o recorte da nuvem de pontos apenas recorta a nuvem de pontos, enquanto os Planos de Corte vão cortar toda a geometria em seu desenho.
O novo comando NUVEMPONTOSDETECTARPISOS gera cortes de volume para cada pavimento encontrado em uma Nuvem de pontos representando um edifício. A detecção é baseada em regiões de pontos com coordenadas-Z semelhantes. Os cortes de volume gerados podem ajudar para navegação em Nuvens de pontos em edifícios.
Projeção de Nuvem de pontos
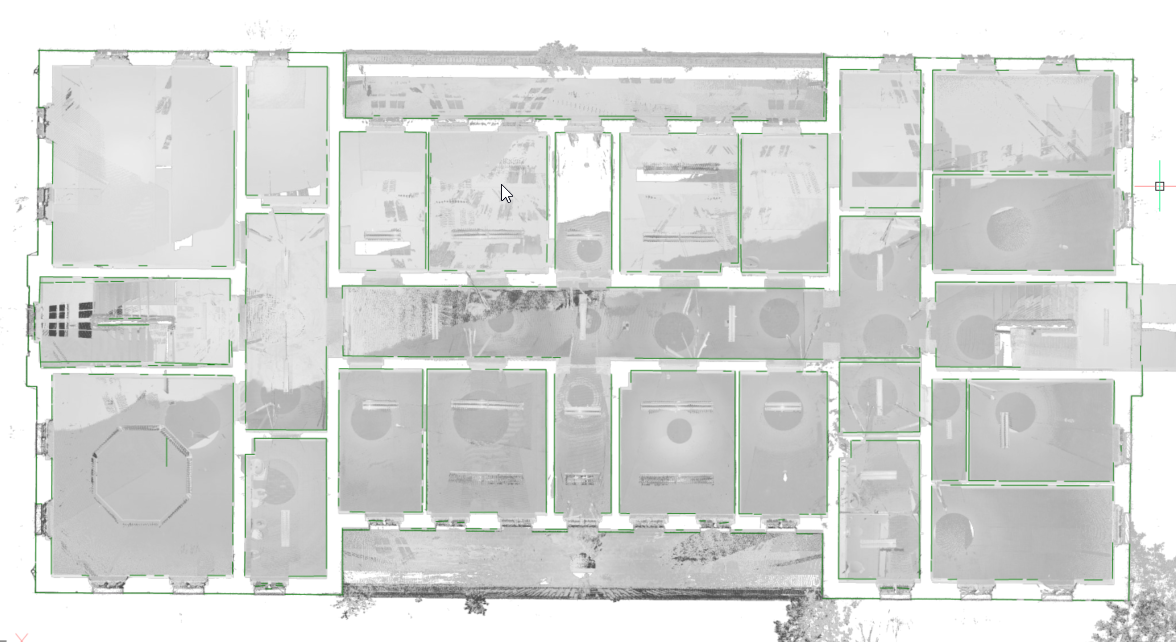
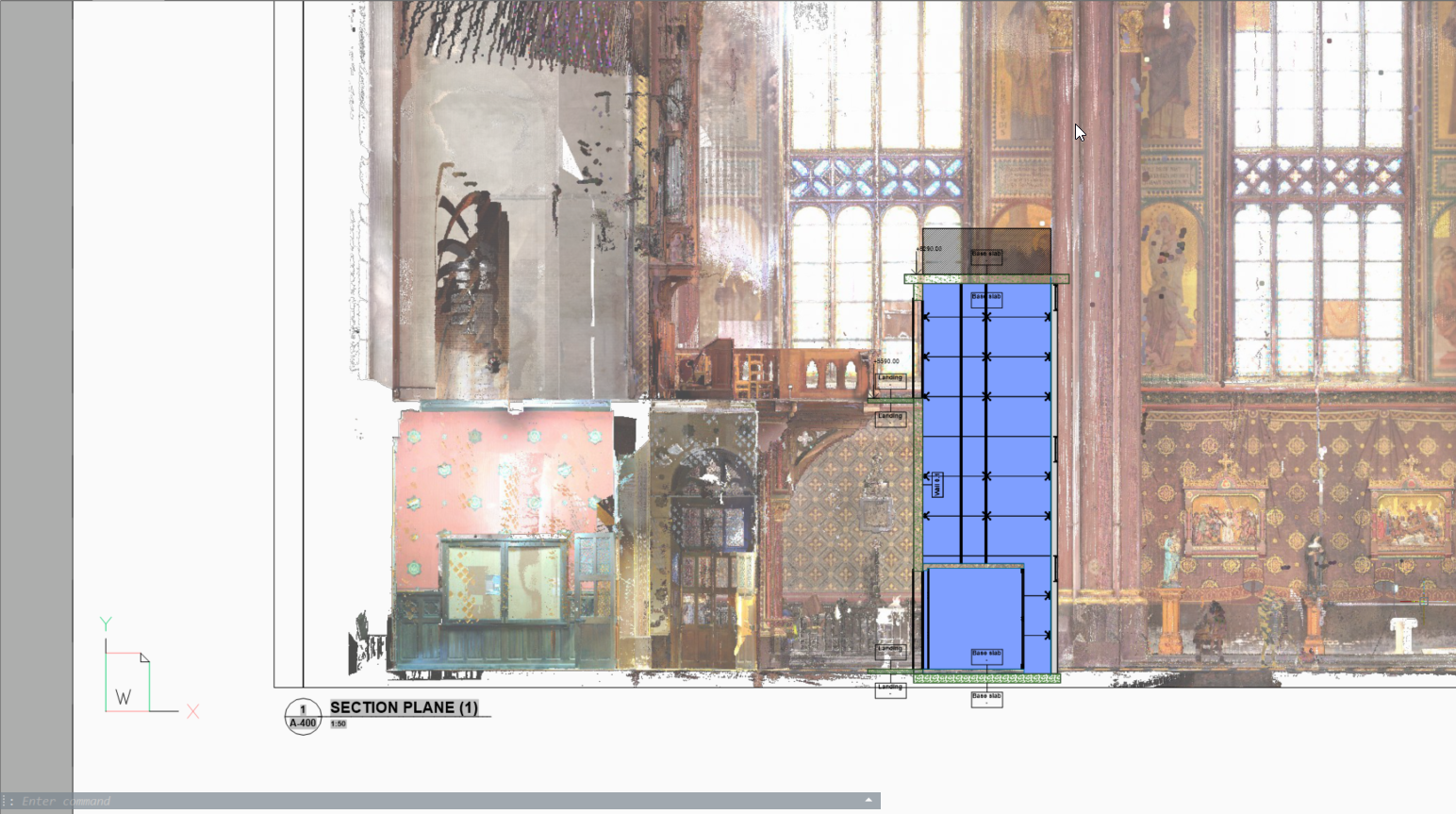
O novo comando NUVEMPONTOSPROJETARCORTE permite detectar paredes a partir do corte de volume de uma Nuvem de pontos, com base em uma variedade de Opções de detecção de parede. Você pode criar automaticamente cortes de volume, para cada pavimento de um edifício. Você pode usar esses cortes para gerar linhas 2D para criar uma planta 2D ou um corte vertical. Este é um processo em segundo plano e múltiplos cortes podem ser processados em uma fila. Desta forma, é possível executar este comando em resolução total em todos os cortes.
Ao mesmo tempo, uma imagem raster é gerada para dar ao usuário algum contexto. Em alguns casos, não é necessário recriar com sólidos o edifício existente. Imagens de fundo podem fornecer muito mais contexto para os documentos do projeto. Essas podem ser usadas para verificar a geometria 2D criada, mas em escanerizações de alta qualidade, essas imagens também podem ser usadas como material gráfico. Por exemplo, como uma imagem de fundo para um modelo BIM em projetos de renovação em edifícios históricos, onde uma intervenção moderna está sendo feita.
Ajustar Plano
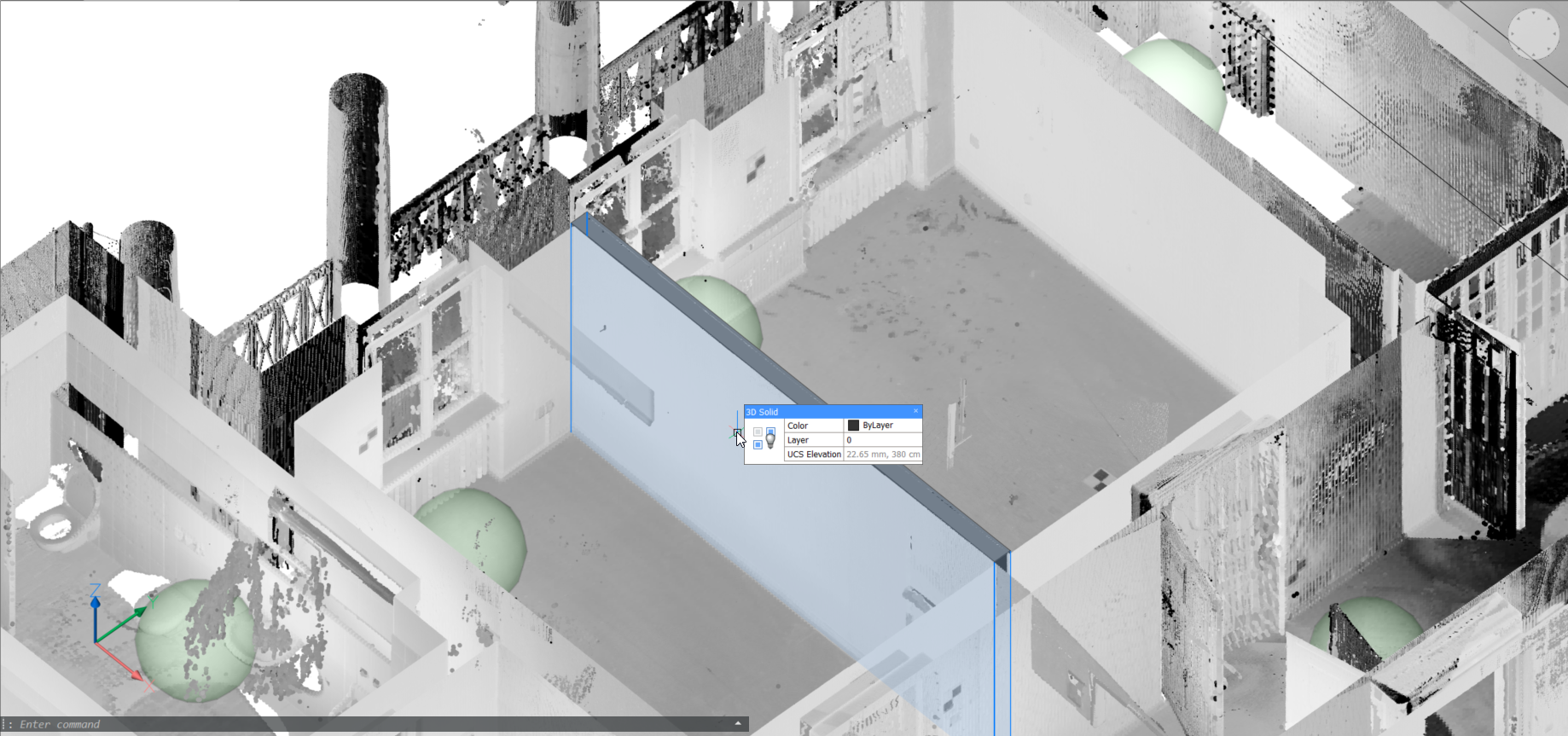
O novo comando NUVEMPONTOSAJUSTARPLANO permite criar geometria 3D com base na nuvem de pontos. Este vai criar uma superfície planar ou um sólido após uma seleção de um ponto em uma nuvem de pontos. Os pontos que parecem estar em um plano nunca estão exatamente em um plano, portanto, um valor de limiar é definido como uma propriedade da entidade Nuvem de pontos. Isso também funciona na vista a partir da bolha.
Note:
Aberturas selecionadas permitem levar em conta as aberturas de portas e janelas.
Ajustar bordas permite ajustar o contorno da borda planar.
Superfícies costuradas fornecem um resultado de vedação entre os vários planos ajustados, por exemplo, em um sólido, e este pode ser usado posteriormente com o comando BIMINVERTERESPACOS.
Na vista da bolha
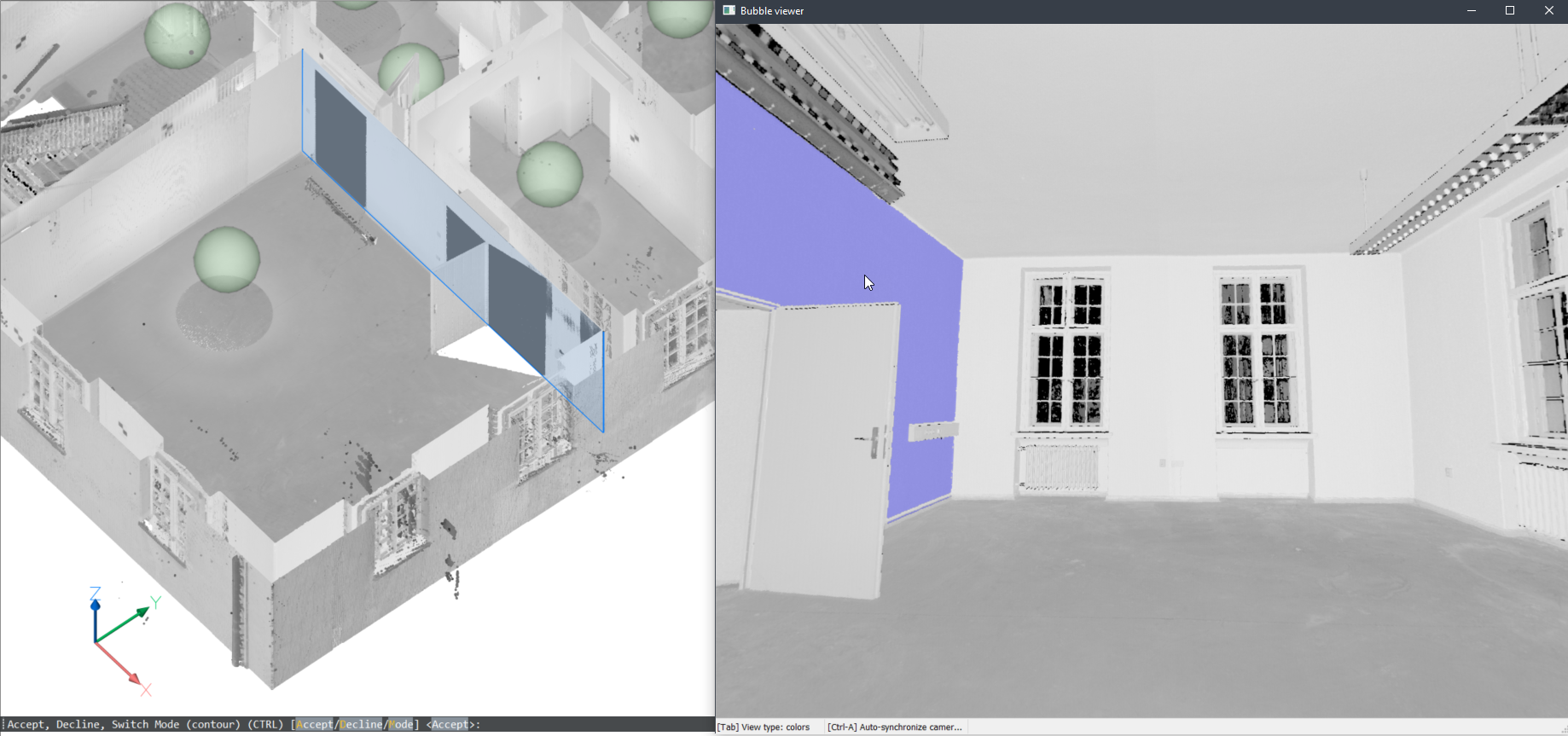
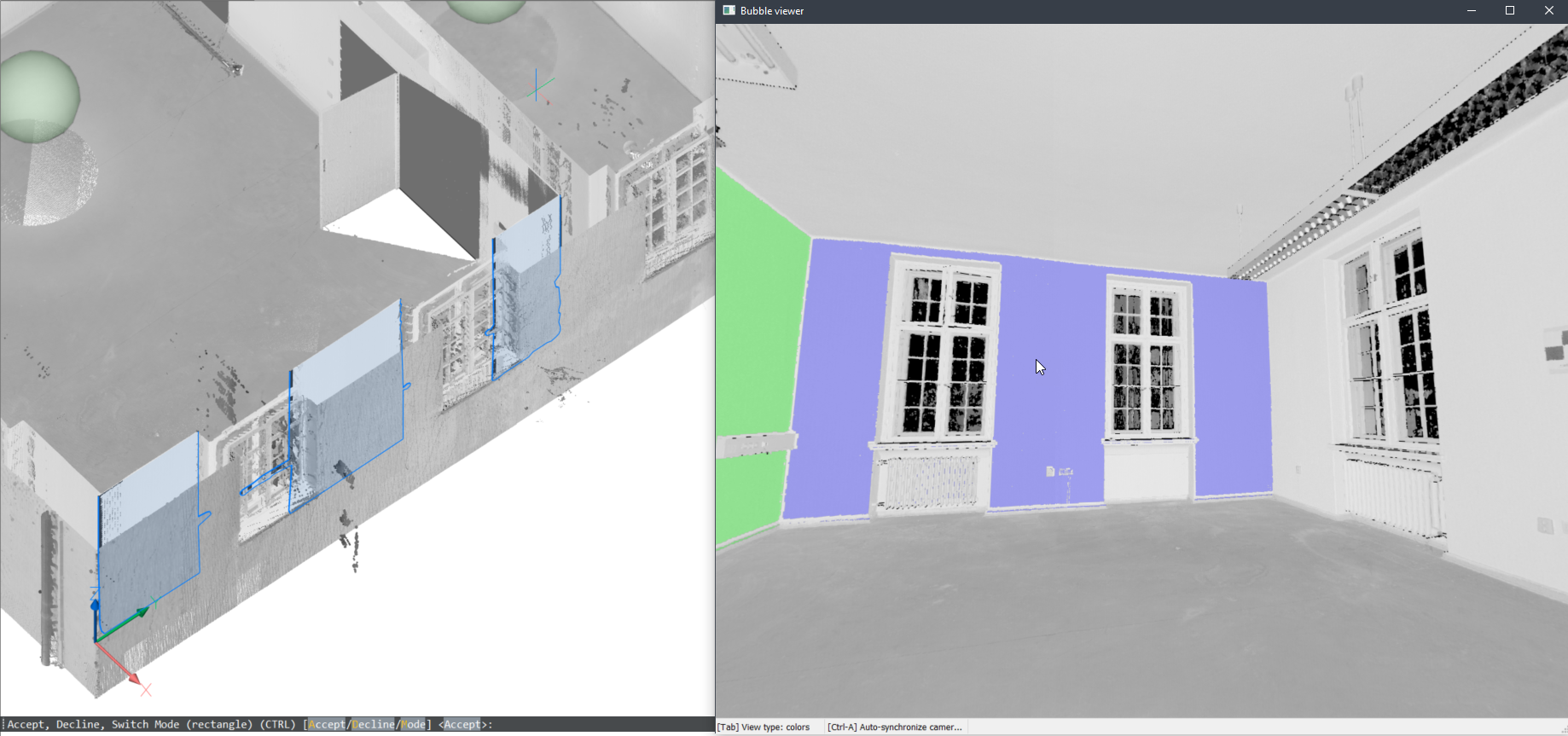
Se o visualizador de bolha estiver aberto antes de iniciar o comando, BricsCAD® espera que você selecione alguns pontos iniciais para o plano no visualizador de bolha. O cursor fornece uma vista prévia da direção normal do plano. A seguir, você obtém uma prévia tanto no visualizador de bolha como na vista do modelo. Você pode alternar entre duas representações de forma/shape usando a tecla Ctrl.
Note: Enquanto ainda está no modo de seleção, os pontos correspondentes na bolha são mostrados em roxo. Esses pontos são mostrados em verde quando o usuário aceita o resultado gerado.
No Model Space
Você também pode usar esse comando no Model Space quando o Visualizador de Bolha não estiver aberto. BricsCAD® pedirá que você selecione um ponto da Nuvem de Pontos no Model Space. Dependendo do tamanho da nuvem de pontos recortada, leva mais tempo, mas tem 2 vantagens ao pesquisar múltiplas posições de varredura:
Esta pode criar superfícies maiores onde apenas partes são visíveis em cada posição de varredura
Pode detectar espessura de parede e laje, uma vez que pode levar em conta a superfície oposta.
Note:
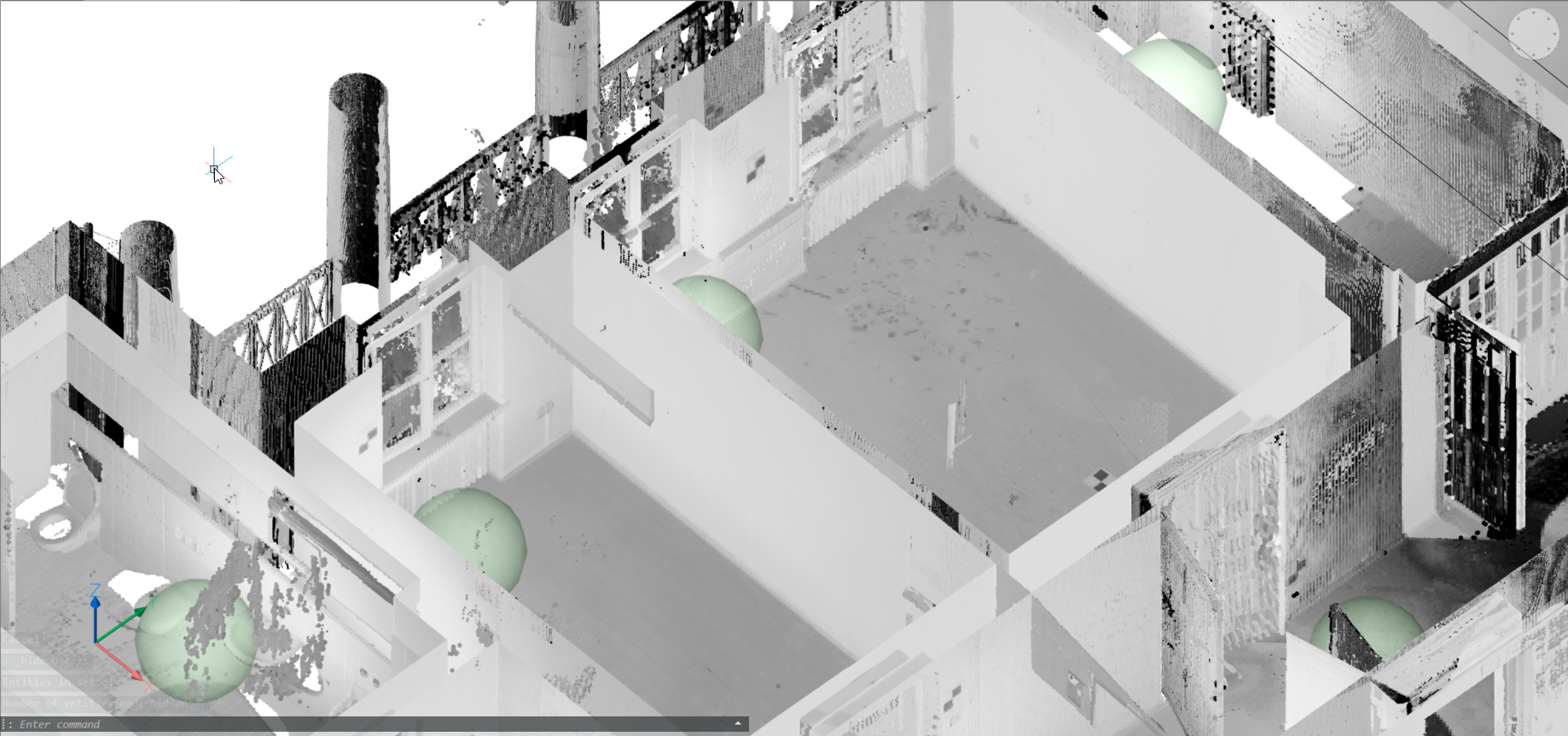
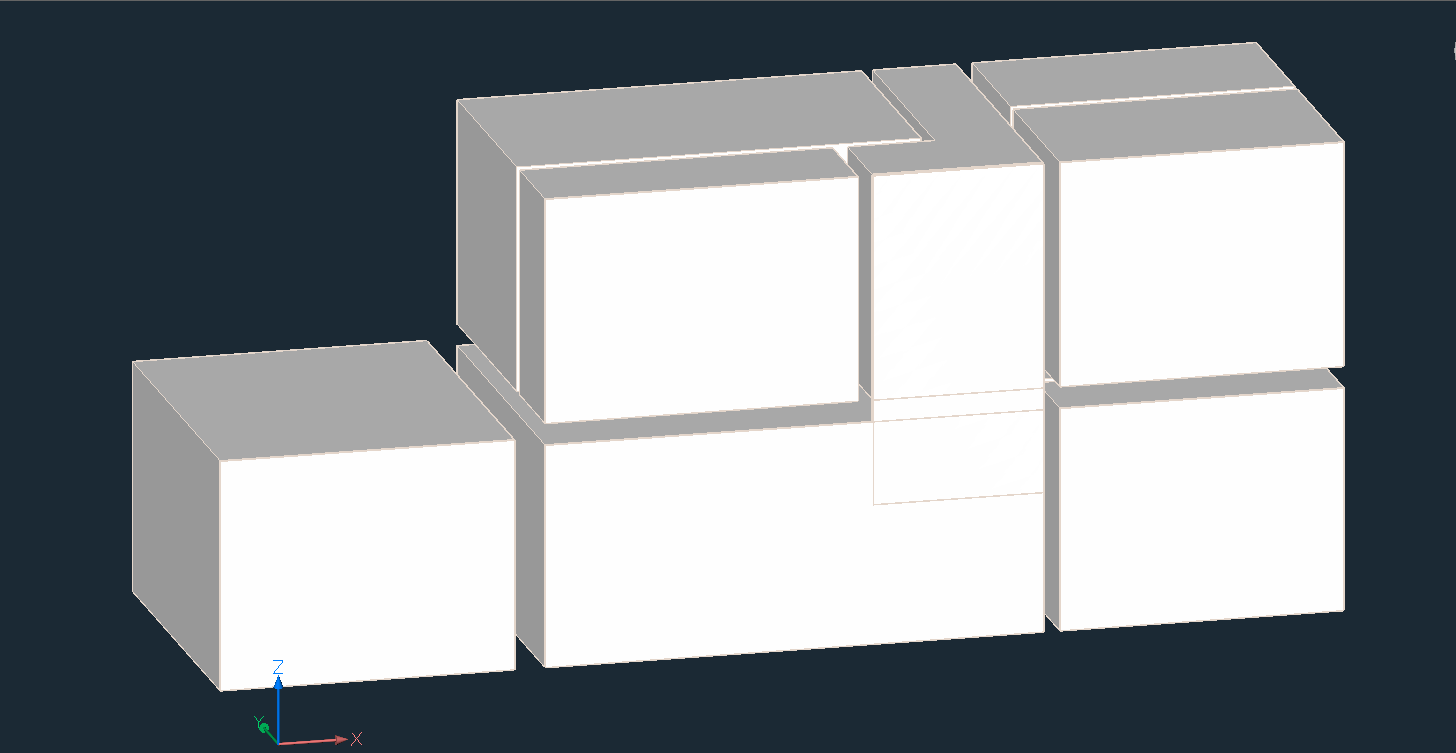
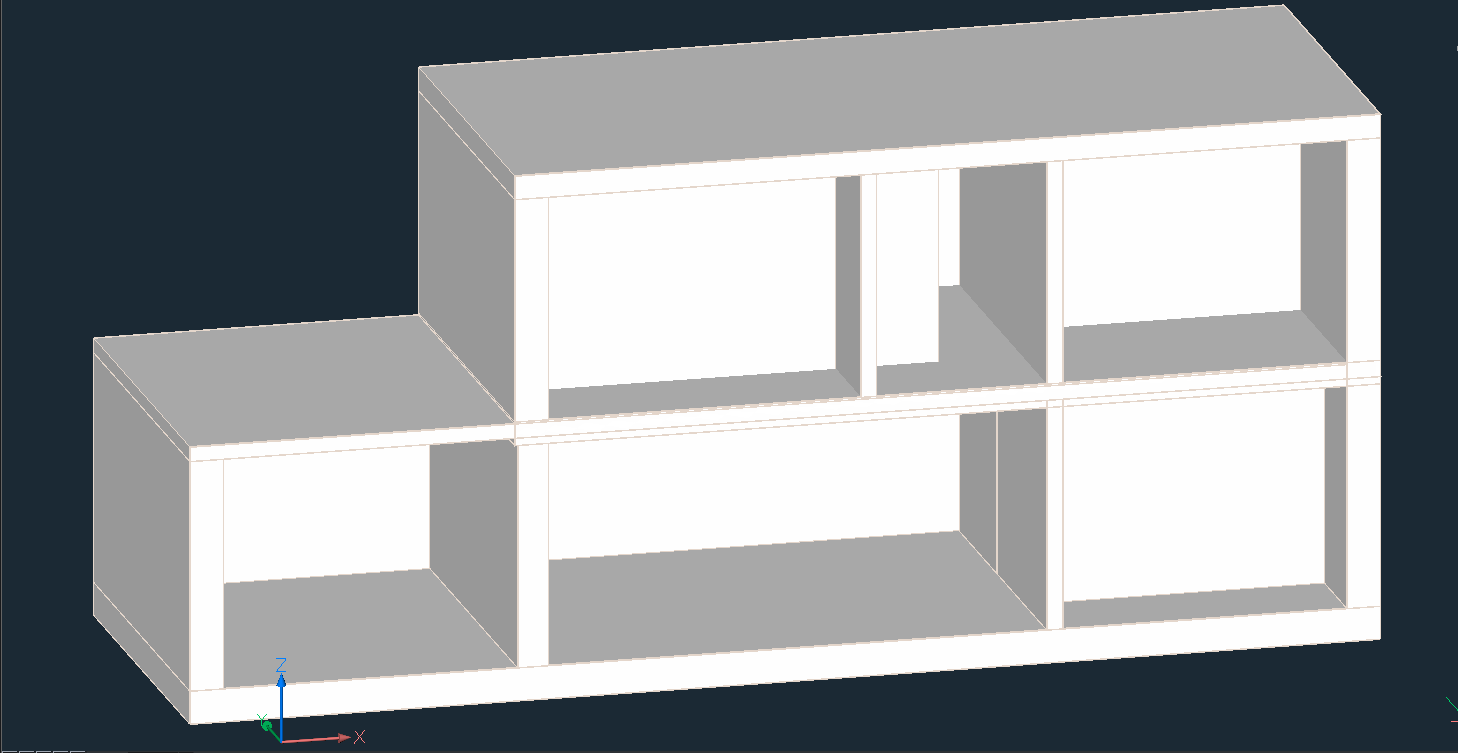
Fluxo de trabalho no qual uma Nuvem de pontos (imagem superior) é primeiro convertida em um conjunto de sólidos, um por espaço, usando resultados de ajuste planar costurados (imagem do meio). O comando BIMINVERTERESPACOS converte esses sólidos temporários de espaço em um modelo de construção com paredes e lajes a partir da inversão desses sólidos.
Ajuste planar em bolhas permite adicionar aberturas (portas, janelas), e ajustar o contorno resultante.
Você pode empregar bolhas para usar pontos de snap, para desenhar coisas como (poli)linhas.
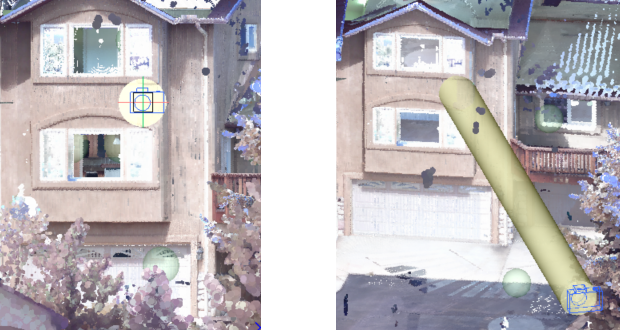
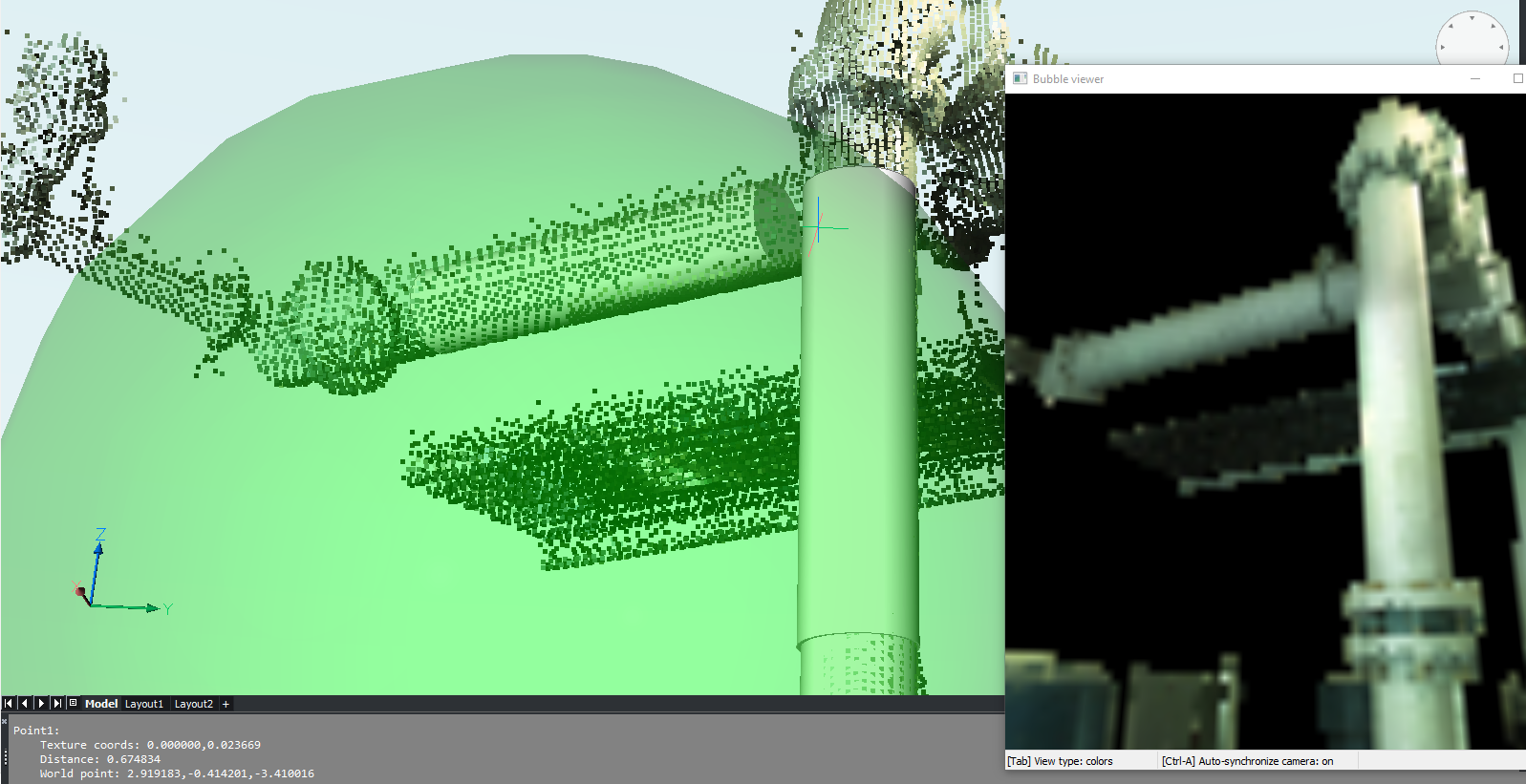
Ajustar cilindro em bolhas:
Janela de visualização de bolhas à direita, Model Space à esquerda. Dois cliques ao longo do eixo do cilindro no espaço da bolha são necessários para extrair um cilindro (resulta como sólido no Model Space). Esta é a primeira versão do algoritmo e vai ficar mais robusta em um futuro próximo.
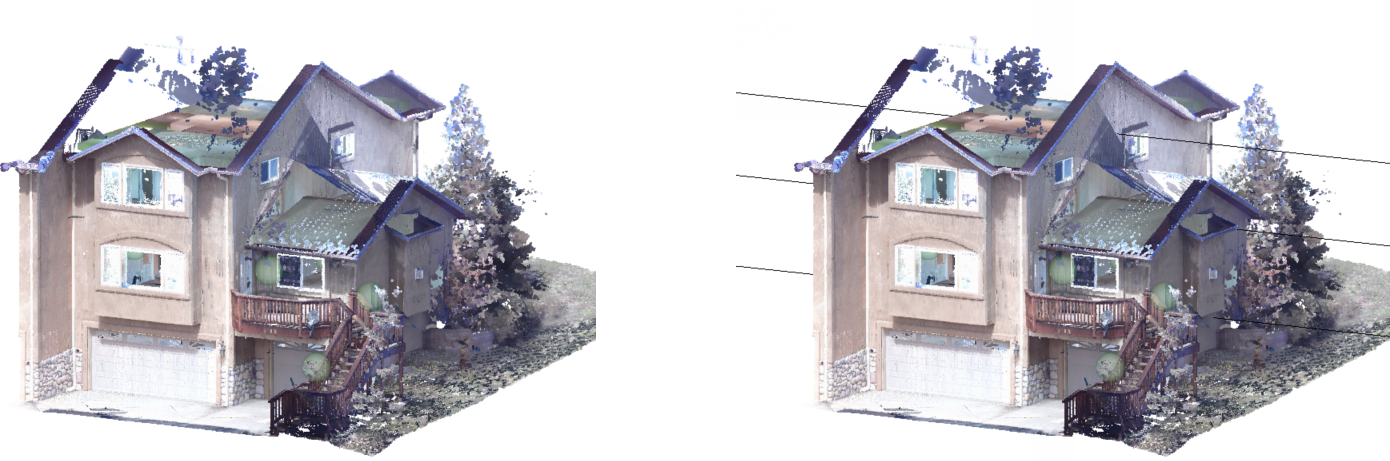
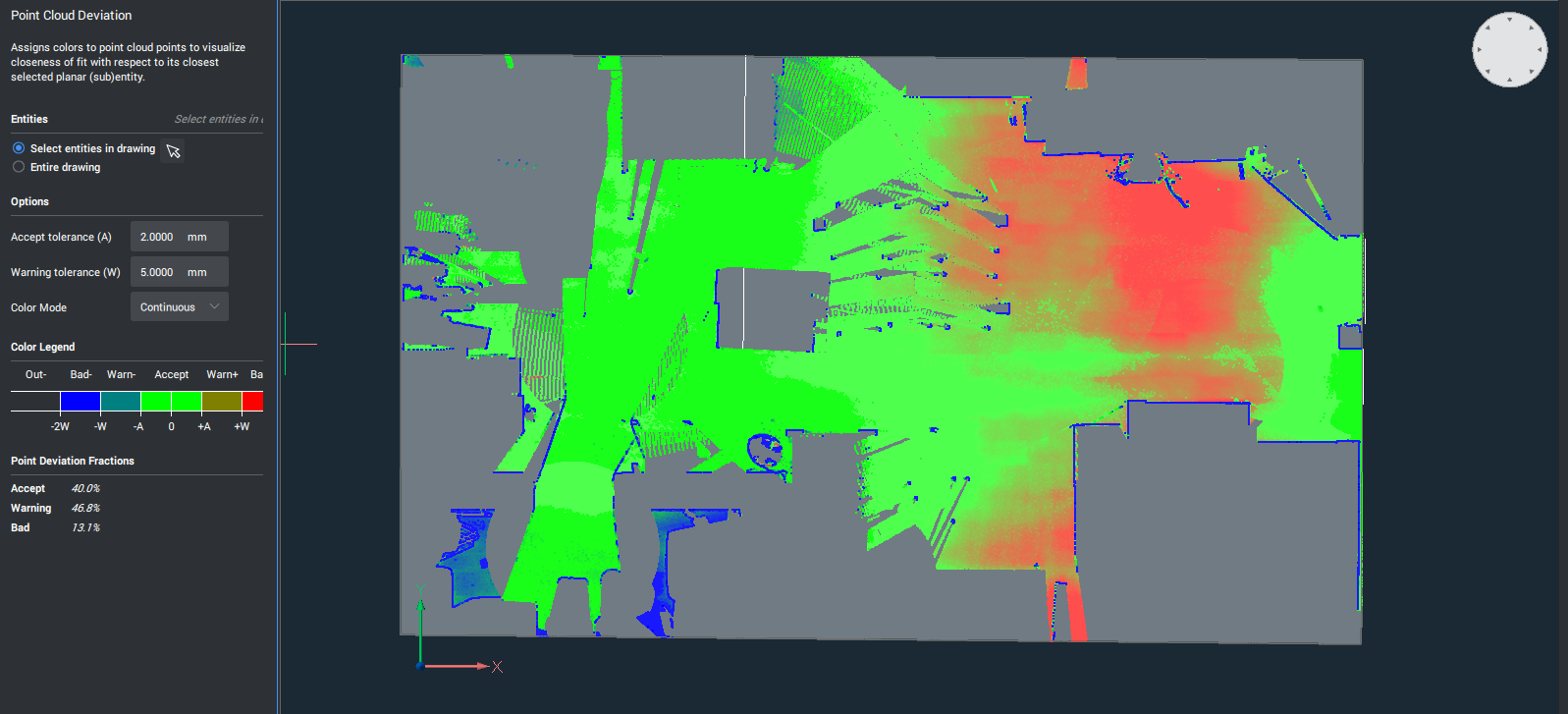
O comando NUVEMPONTOSDESVIO permite avaliar visualmente o ajuste entre estruturas planares e pontos da Nuvem de pontos.
Corte de nuvem de ponto do piso de uma casa:
Visualização das distâncias dos pontos a partir do plano do piso. No painel à esquerda, uma explicação das cores é fornecida (verde é o plano, o gradiente de verde para azul aqui está acima do plano, e o gradiente de verde para vermelho está abaixo do plano). Além disso, um resumo das percentagens de pontos em que a categoria é apresentada (OK, nível de aviso,...)