



Работа с облаками точек
Команды
POINTCLOUD command, POINTCLOUDALIGN command, POINTCLOUDATTACH command, -POINTCLOUDATTACH command, POINTCLOUDCOLORMAP command, POINTCLOUDCROP command, POINTCLOUDCROPSOLID command, POINTCLOUDDELETEITEM command, POINTCLOUDDETECTFLOORS command, POINTCLOUDEXPORT command, POINTCLOUDFITPLANAR command, POINTCLOUDIMPORT command, POINTCLOUDPOINTSIZE_MINUS command, POINTCLOUDPOINTSIZE_MINUS command, POINTCLOUDPOINTSIZE_PLUS command, POINTCLOUDPREPROCESS команда, -POINTCLOUDPREPROCESS command, POINTCLOUDPROJECTSECTION command, POINTCLOUDREFERENCE command, POINTCLOUDSHOWBUBBLES command, POINTCLOUDUNCROP command, POINTCLOUDPOINTMAX system variable
В BricsCAD V21 были значительно расширены возможности обработки облаков точек (особенно при использовании лицензии BricsCAD BIM).
Предварительная обработка
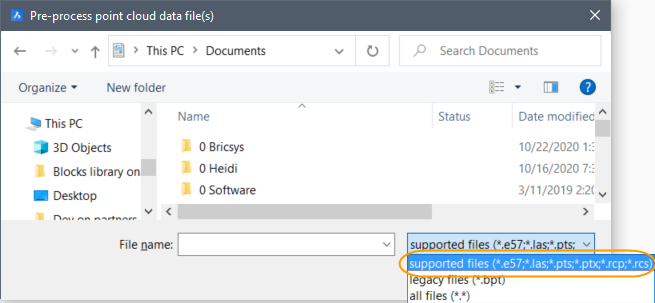
Предварительная обработка облаков точек в BricsCAD V21 выполняется в 5-8 раз быстрее, чем в V20.
Файл журнала доступен в папке C:\Users\USERNAME\AppData\Roaming\Bricsys\BricsCAD\V21x64\ru_RU\PointCloudCache\{Папка_для_обрабатываемого_облака_точек} , только если этот путь задан в системной переменной POINTCLOUDCACHEFOLDER. В этой папке сохраняется текущее состояние обработки.
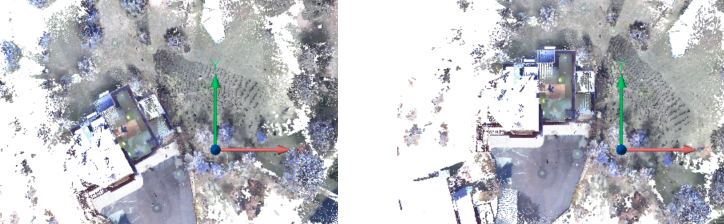
Выравнивание
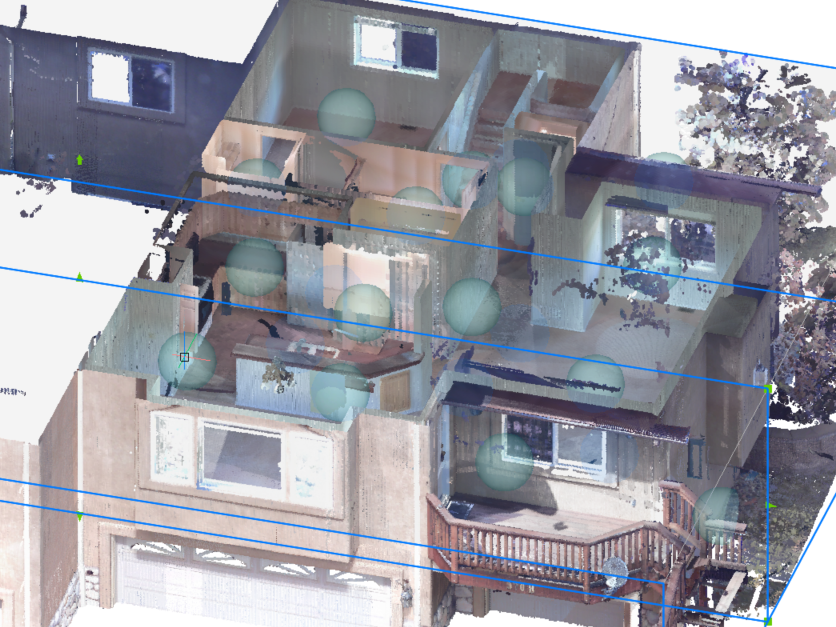
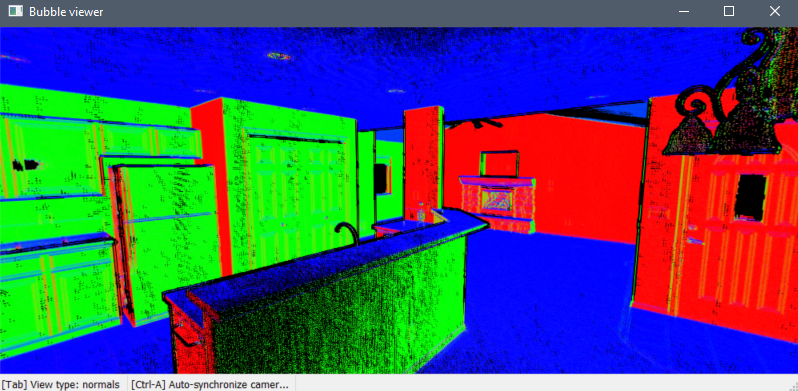
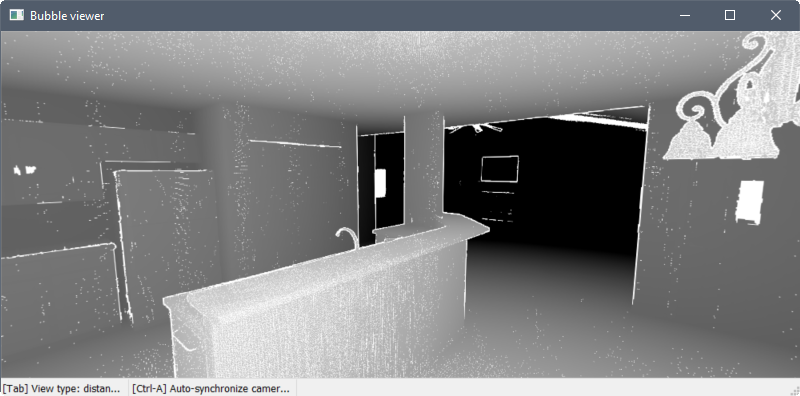
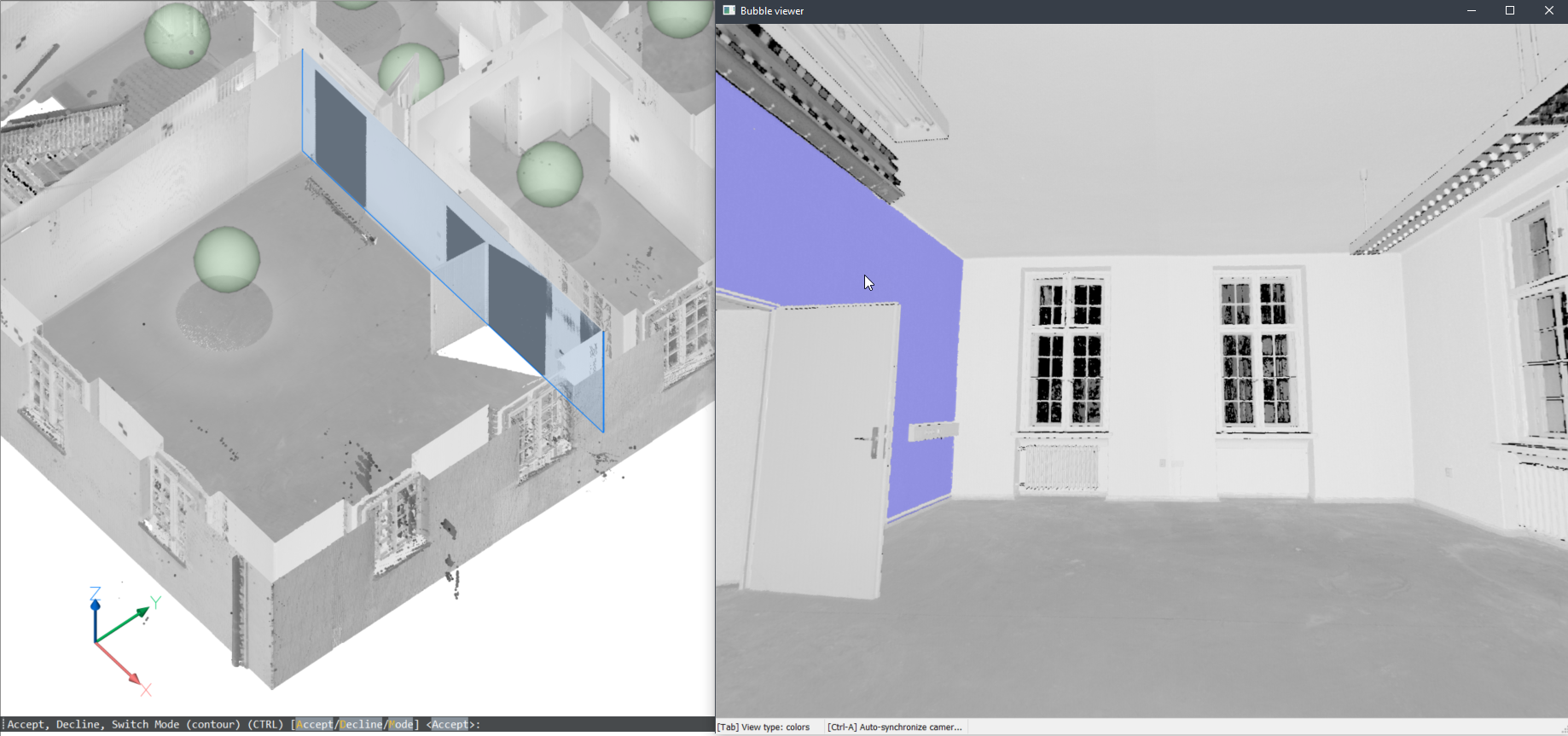
Сферы обзора

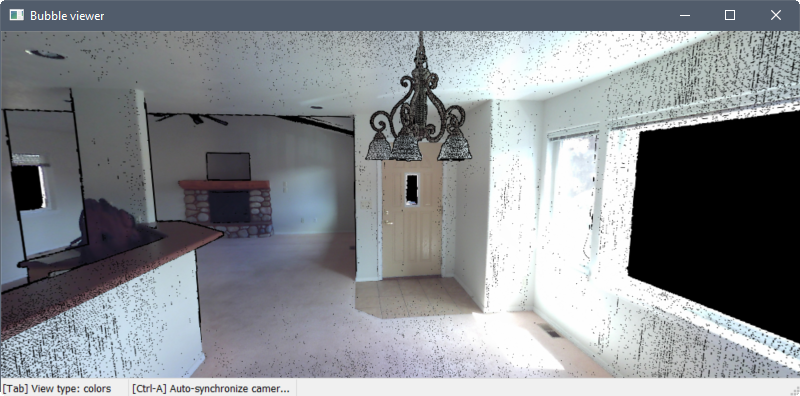
Для переключения между тремя различными визуальными режимами используется клавиша Tab.
В первом режиме точки отображаются в их фактическом цвете или в оттенках серого, в зависимости от метода сканирования данных.

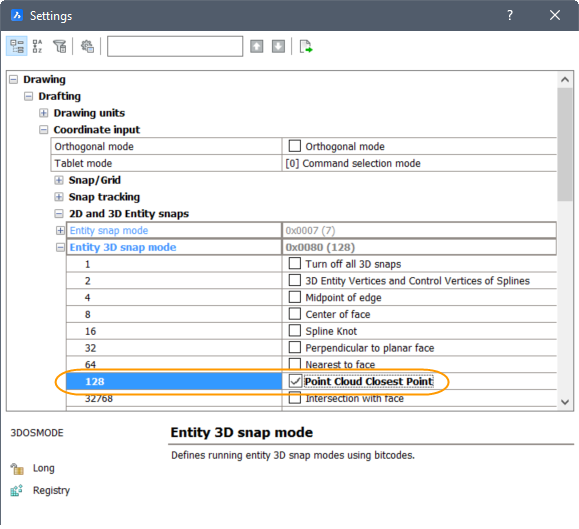
Объектная привязка
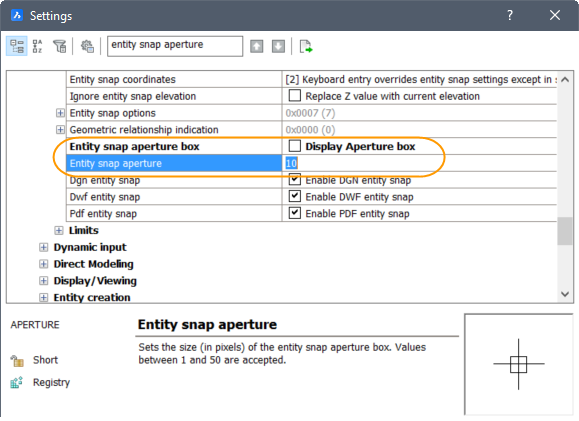
Для включения этой привязки добавлены соответствующие элементы в контекстное меню, панель инструментов и параметры объектной привязки.
Экспорт
Новая команда POINTCLOUDEXPORT позволяет экспортировать вырезанный фрагмент облака точек в файл .pts.
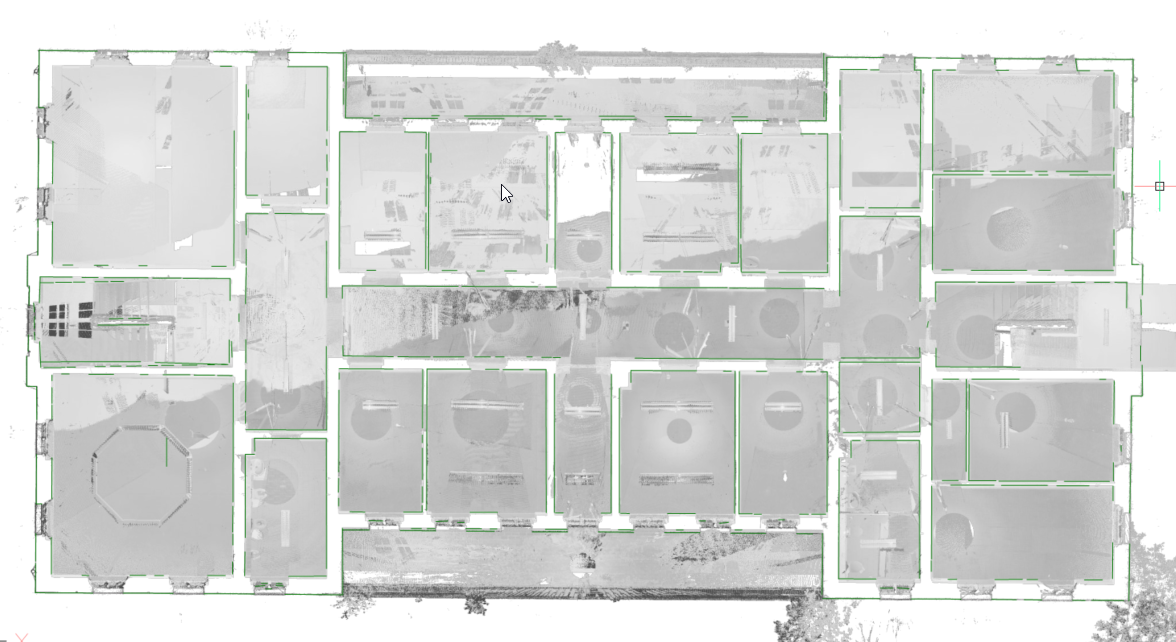
Распознавание этажей
Секущие плоскости работают и с облаками точек и могут быть использованы для отображения частей облаков точек. Различие между обрезкой облака точек и использованием секущих плоскостей заключается в том, что обрезка облака точек обрезает только облако точек, в то время как секущие плоскости обрезают всю геометрию на чертеже.
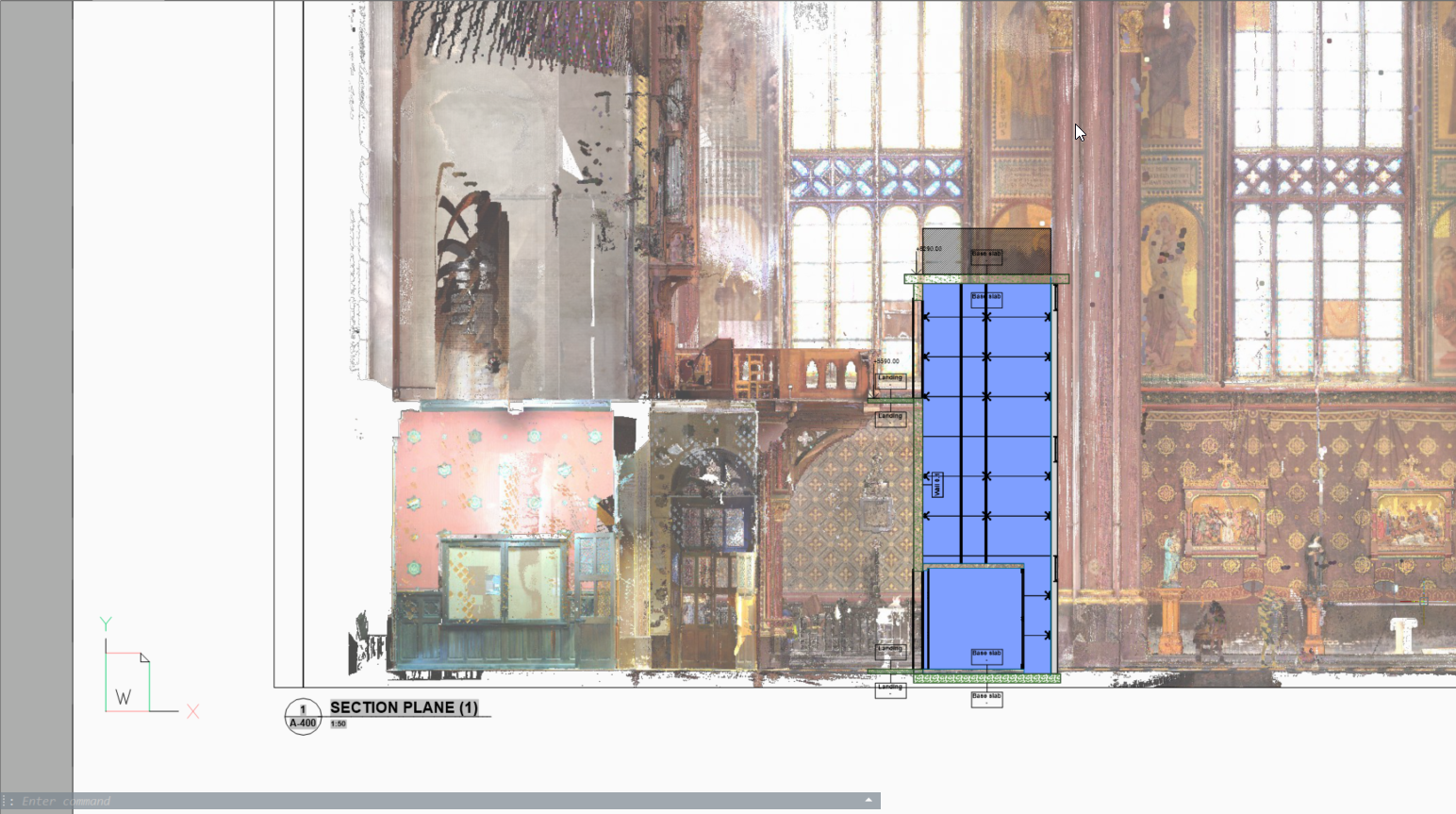
Проекция облака точек
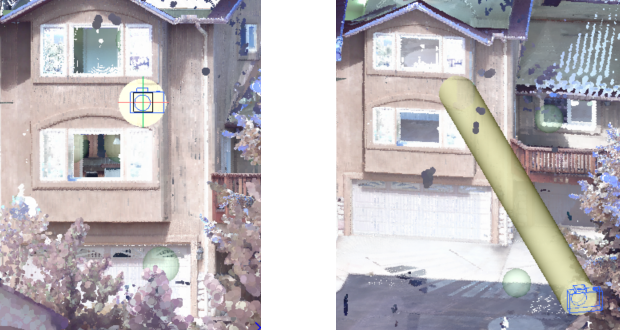
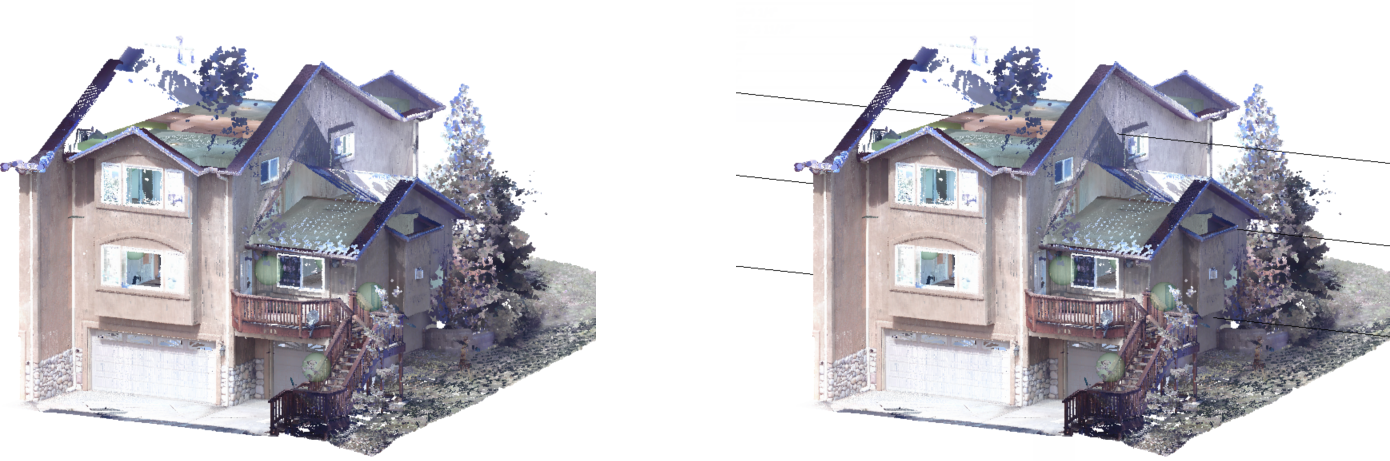
Подгонка плоскостей
Новая команда POINTCLOUDFITPLANAR позволяет создавать 3D геометрию на основе облака точек. Она формирует плоскую поверхность или тело после выбора одной точки из облака точек. Точки, отображающие плоскость, никогда не находятся точно в одной плоскости, поэтому в свойствах объекта Облако точек устанавливается пороговое значение. Это также используется в сферах обзора.
Вид из сферы обзора
Вид в пространстве модели
При отключении сферы обзора вы можете использовать эту команду в пространстве модели. BricsCAD предложит вам выбрать точку облака точек в пространстве модели. В зависимости от размера обрезанного облака точек на это может уйти больше времени, но у этого способа есть 2 преимущества благодаря использованию нескольких положений сканирования:
- Создание больших поверхностей, для которых в каждой позиции сканирования видна только их часть
- Учет положения противоположной поверхности позволяет определять толщину стен и перекрытий.
