



Trabajar con nubes de puntos
Preprocesamiento
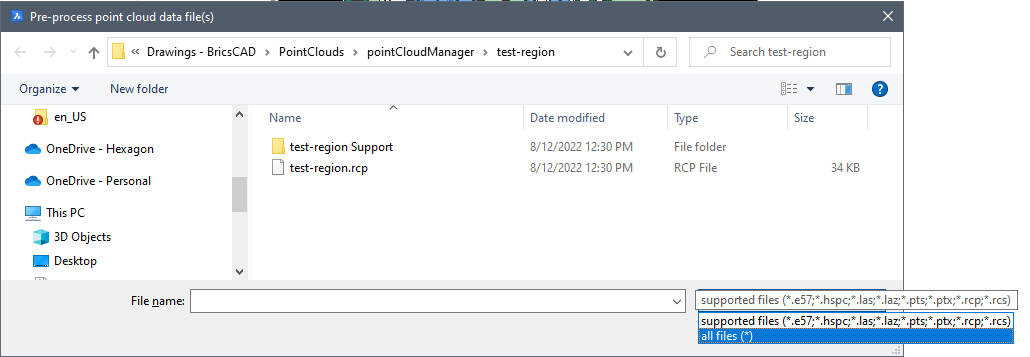
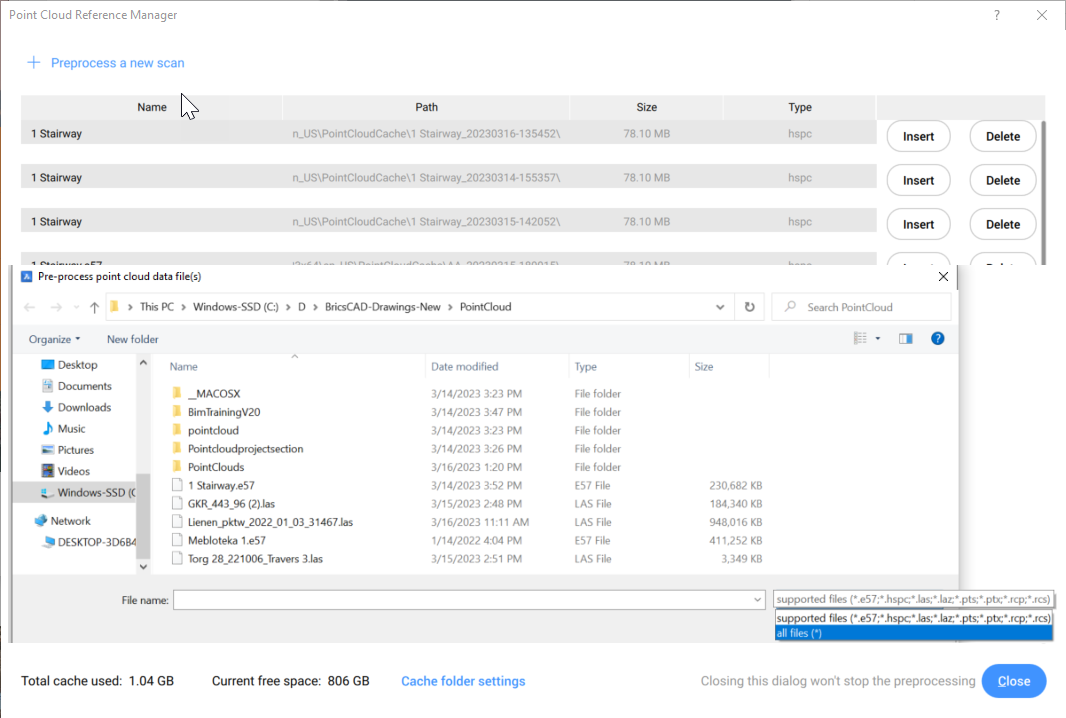
Para preprocesar una nube de puntos, puede usar el comando ENLAZARNUBEPUNTOS o seleccionar Procesar un nuevo escaneo en el Administrador de referencias de nubes de puntos, al que se puede acceder usando el comando REFERENCIADEPUNTOS.
El progreso del preprocesamiento se registra en un archivo de registro en la subcarpeta relacionada con la nube de puntos. Esta subcarpeta se encuentra dentro de la ruta de caché de la nube de puntos actual. La ruta predeterminada para la memoria caché de la nube de puntos actual es C:\Users\USERNAME\AppData\Roaming\Bricsys\BricsCAD\V23x64\en_US\PointCloudCache\Folder_for_processed_pointcloudy se puede establecer en la variable de sistema POINTCLOUDCACHEFOLDER.
Alineación
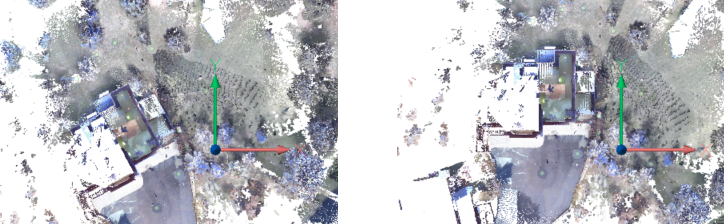
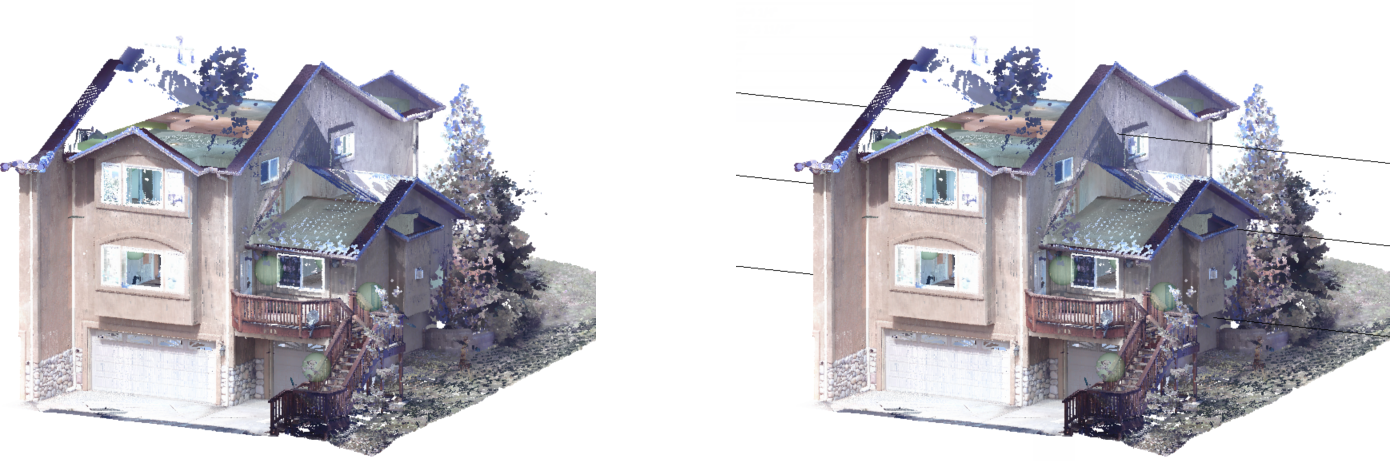
El comando POINTCLOUDALIGN rota automáticamente una nube de puntos para alinearla de manera óptima con los ejes X e Y, teniendo en cuenta las superficies planas verticales en la nube de puntos (p. ej. paredes). Para determinar la mejor alineación, se le pedirá que especifique el área más relevante de la nube de puntos que contiene las paredes.
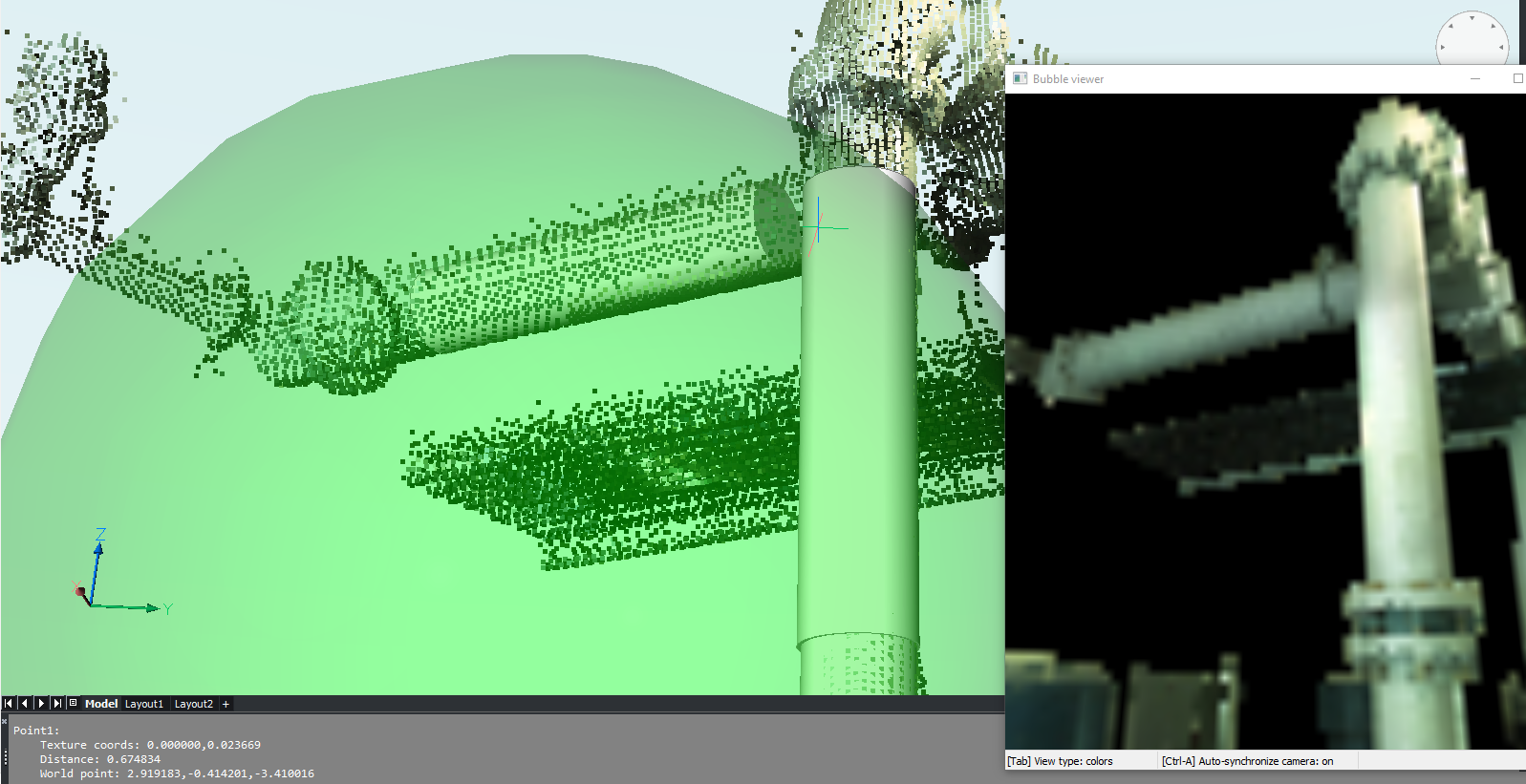
Visor de burbujas
Según el formato de archivo original de la nube de puntos y el tipo de escáner utilizado durante el escaneo, es posible que se muestren burbujas (esferas verdes) en todas las ubicaciones de escaneo.
En estos lugares, experimentará las representaciones visuales más realistas al abrir el visor de burbujas.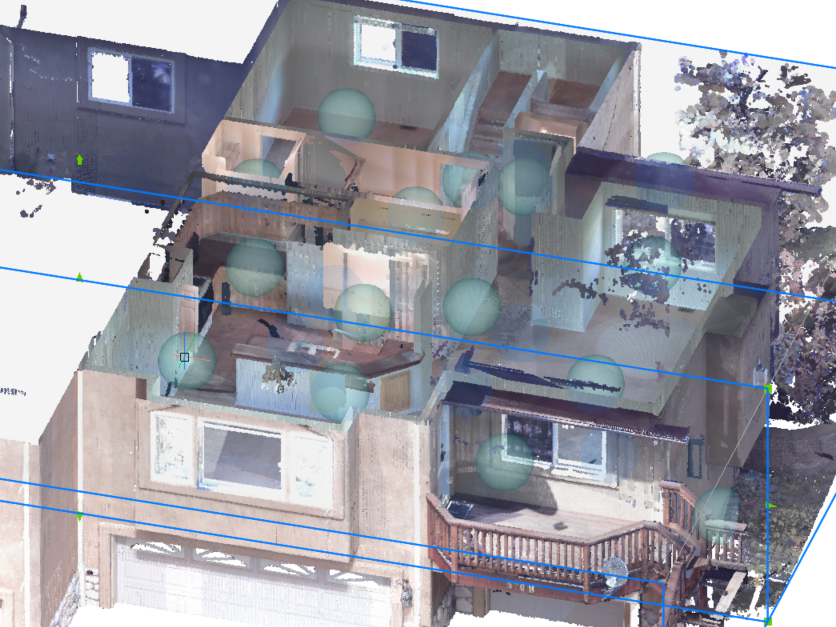
Indique un índice de burbuja en el comando POINTCLOUDBUBBLEVIEWER o haga doble clic en una de las burbujas en el espacio modelo para abrir el visor de burbujas. Puede mantener presionado el botón central del ratón y mover el mouse para ver la nube de puntos en cualquier dirección desde esa ubicación de escaneo. También puede acercar y alejar con la rueda del ratón.


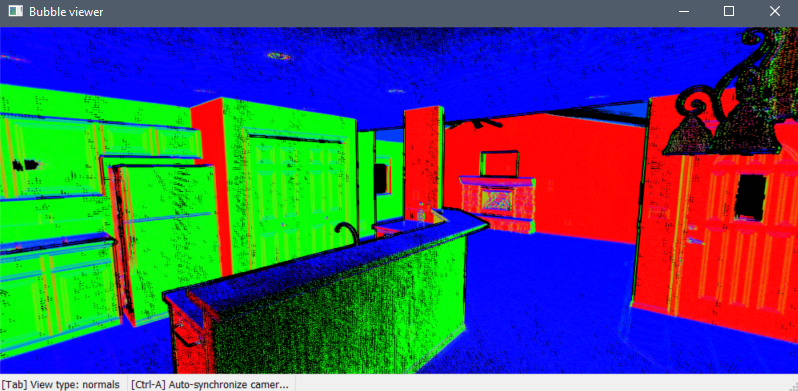
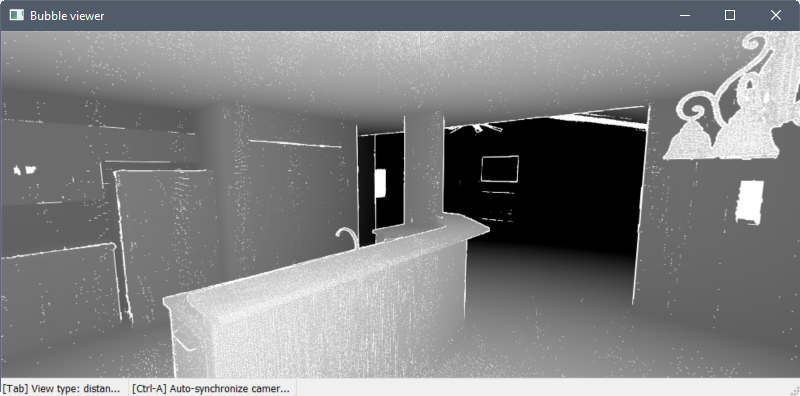
Presiona la tecla Tab para recorrer tres modos visuales diferentes.
El primer modo muestra los puntos con sus colores reales o en escala de grises, según cómo se escanearon los datos.
El segundo modo muestra los puntos como rojo, verde o azul según sus vectores normales. Los colores corresponden a los ejes SCP.

Instantáneas de entidad
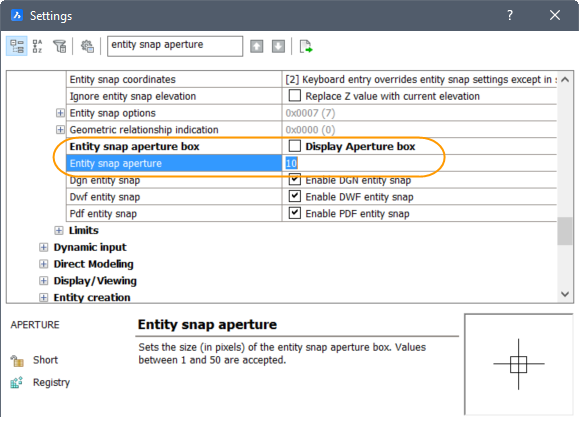
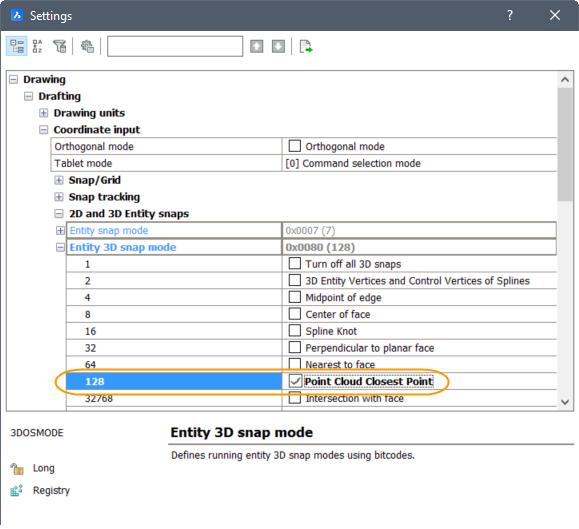
Habilite la nueva referencia de entidad Punto más cercano de la nube de puntos junto con otras referencias de entidad 3D en los menús, la barra de herramientas y la configuración de snap de entidad.
Exportar
El comando POINTCLOUDEXPORT le permite exportar las partes visibles de una nube de puntos a un archivo PTS, HSPC o LAZ.
Detección de piso
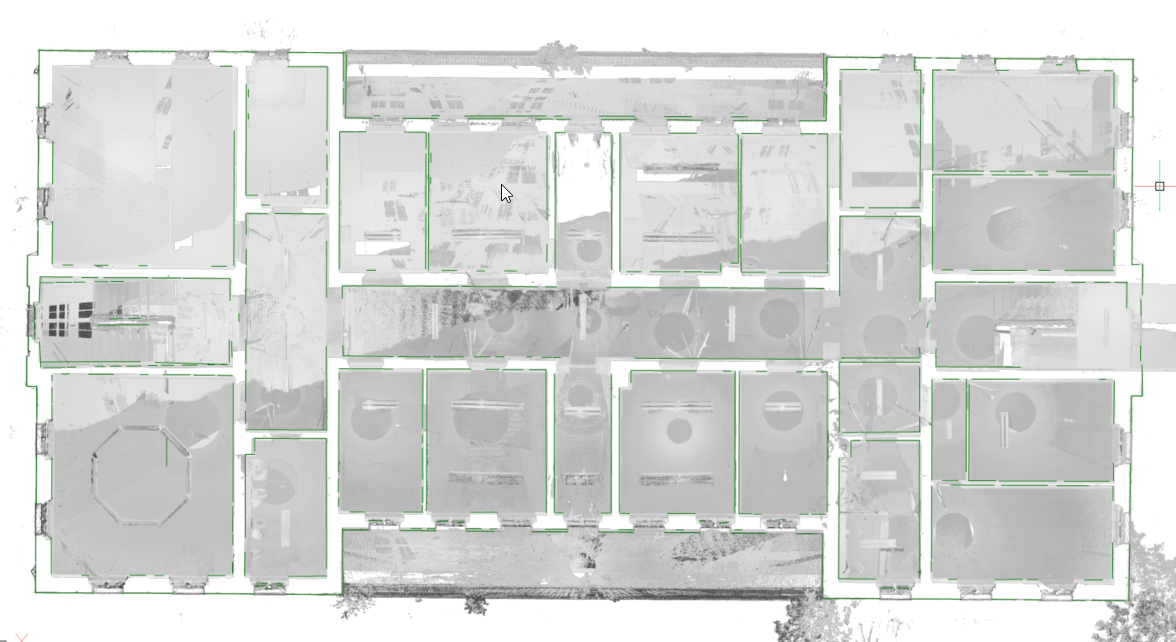
Proyección de nube de puntos
Ajuste plano
El comando POINTCLOUDFITPLANAR le permite crear geometría 3D basada en la nube de puntos. Creará una superficie plana o un sólido después de seleccionar un punto inicial en una nube de puntos. Para detectar los puntos que se encuentran en el mismo plano que el punto inicial, se utiliza un valor de umbral que se puede establecer como una propiedad de la entidad de nube de puntos. Al mantener presionado el botón de cambio y seleccionar las paredes adyacentes de una habitación, los planos ajustados se extenderán/recortarán para formar una superficie cerrada.
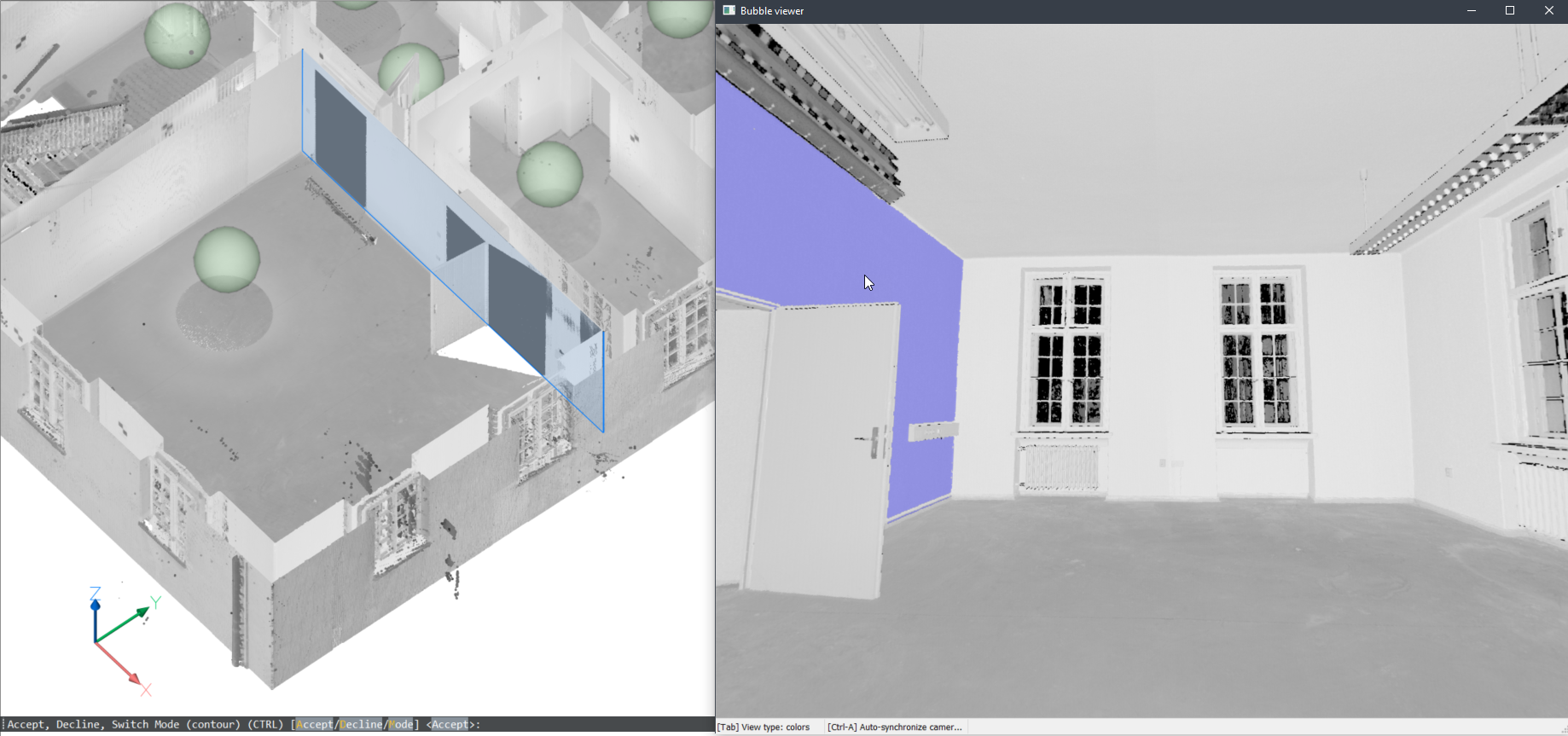
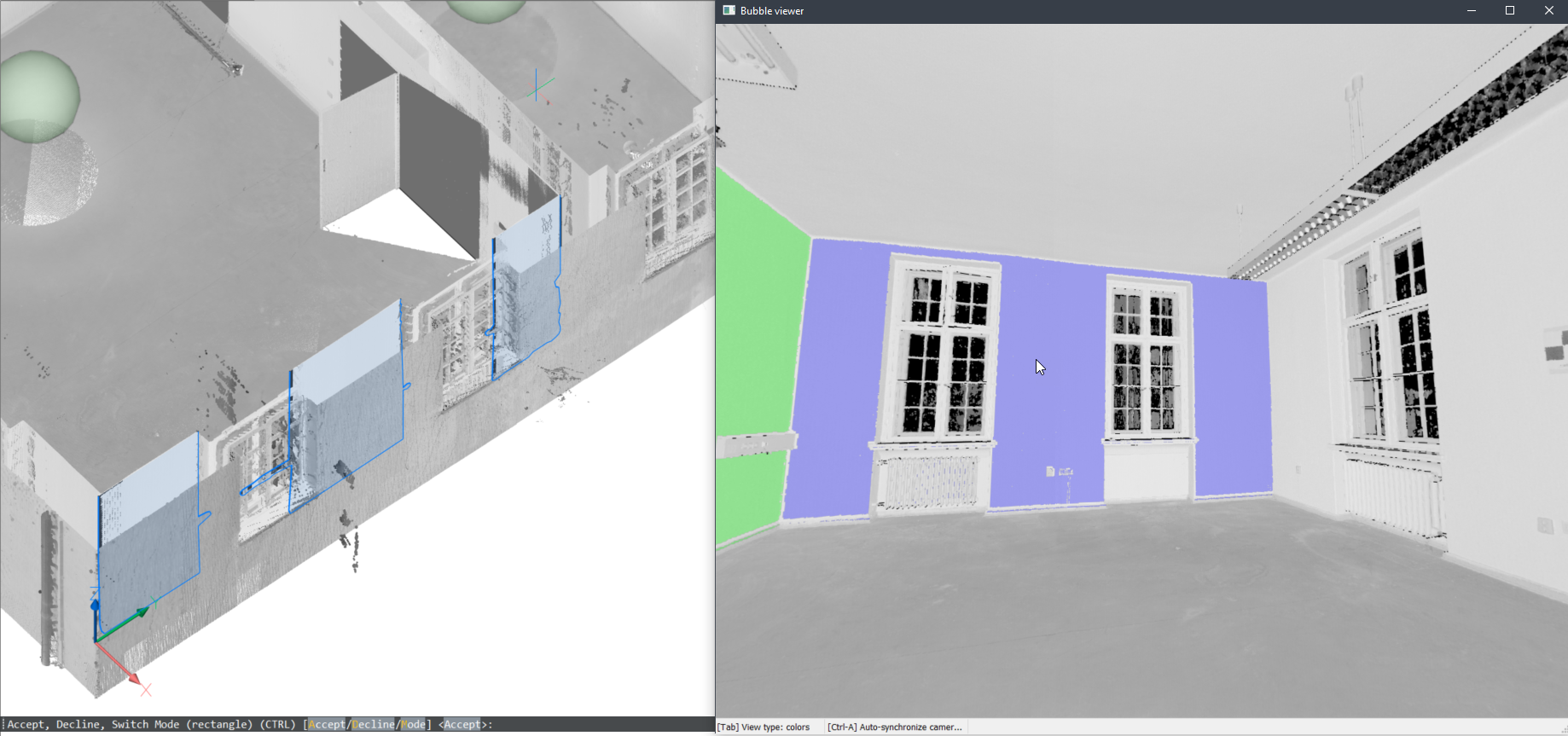
- Seleccionar aberturas le permite tener en cuenta las aberturas de puertas y ventanas (solo en el visor de burbujas).
- Ajustar bordes le permite ajustar el contorno del borde plano.
- Coser superficies permite unir el resultado de varios planos ajustados en, por ejemplo, un sólido que se puede usar más tarde con el comando BIMINVERTSPACE.
- En vista de burbuja
-
Si el visor de burbujas está abierto cuando se ejecuta el comando, BricsCAD espera que seleccione los puntos iniciales del plano dentro del visor de burbujas. El cursor le dará una vista previa de la dirección normal del plano. A continuación, obtiene una vista previa tanto en el visor de burbujas como en la vista de modelo. Puede alternar entre 2 representaciones de forma con la tecla CTRL.Note: Mientras aún está en el modo de selección, los puntos correspondientes en la burbuja se muestran en color púrpura. Estos puntos se muestran en verde una vez que el usuario acepta el resultado generado.
- En el espacio modelo
-
También puede usar este comando en el espacio modelo cuando el visor de burbujas no está abierto. BricsCAD le pedirá que seleccione un punto de la nube de puntos en el espacio modelo. Según el tamaño de las partes visibles de la nube de puntos, esto puede llevar más tiempo que ejecutar el comando dentro del visor de burbujas. sin embargo, esto tiene 2 ventajas al buscar múltiples posiciones de escaneo:
- Puede crear superficies más grandes combinando partes de diferentes escaneos.
- Puede detectar espesores de paredes y losas.
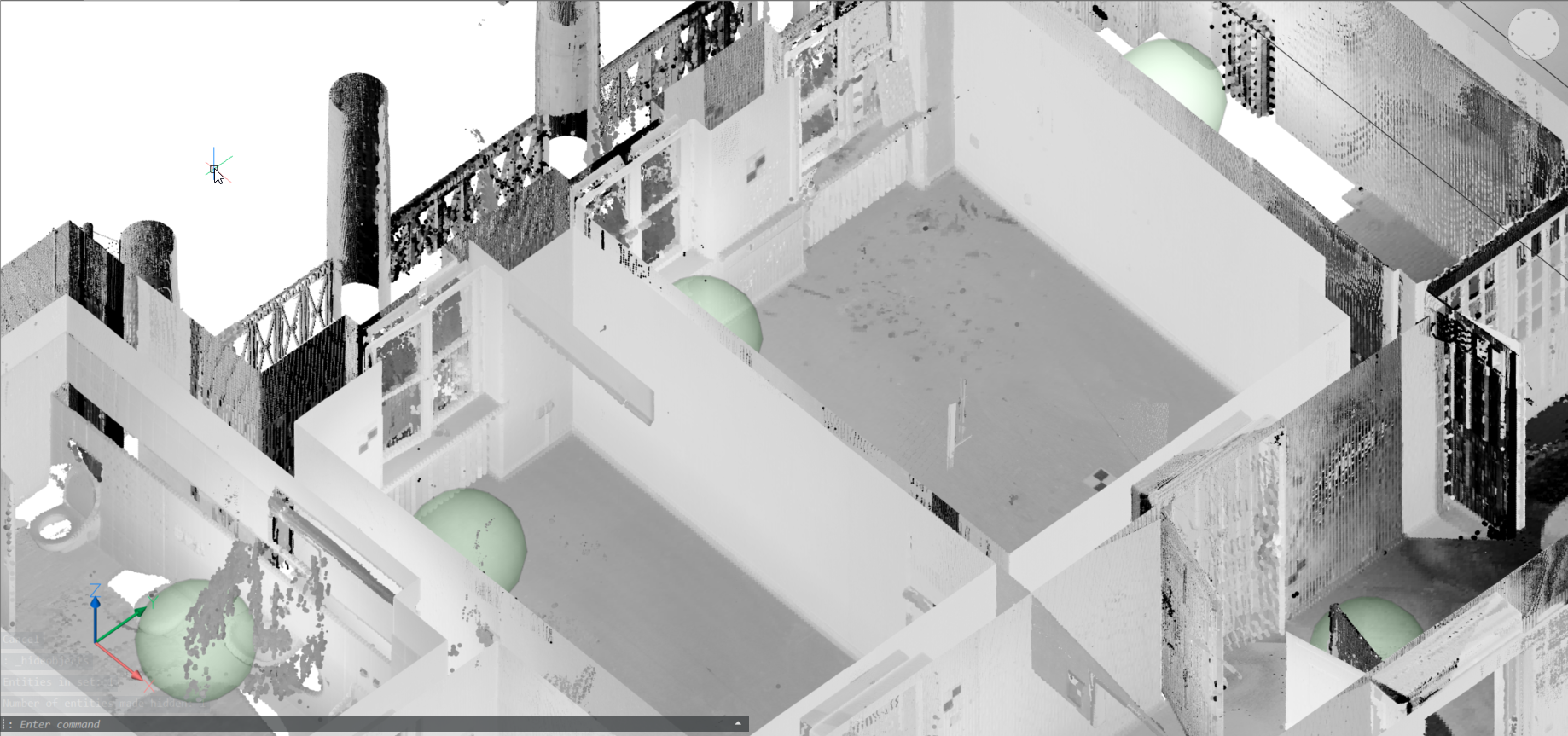
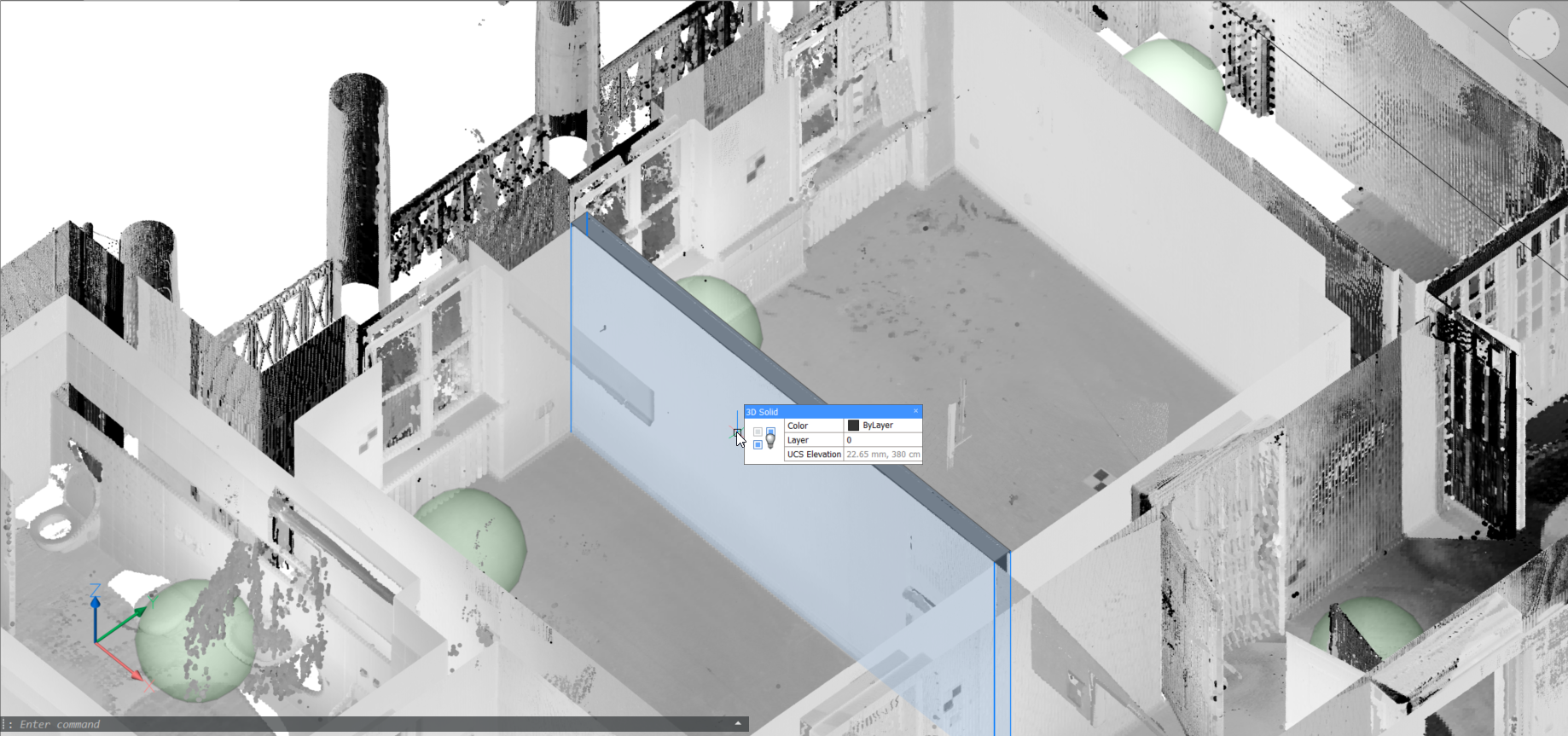
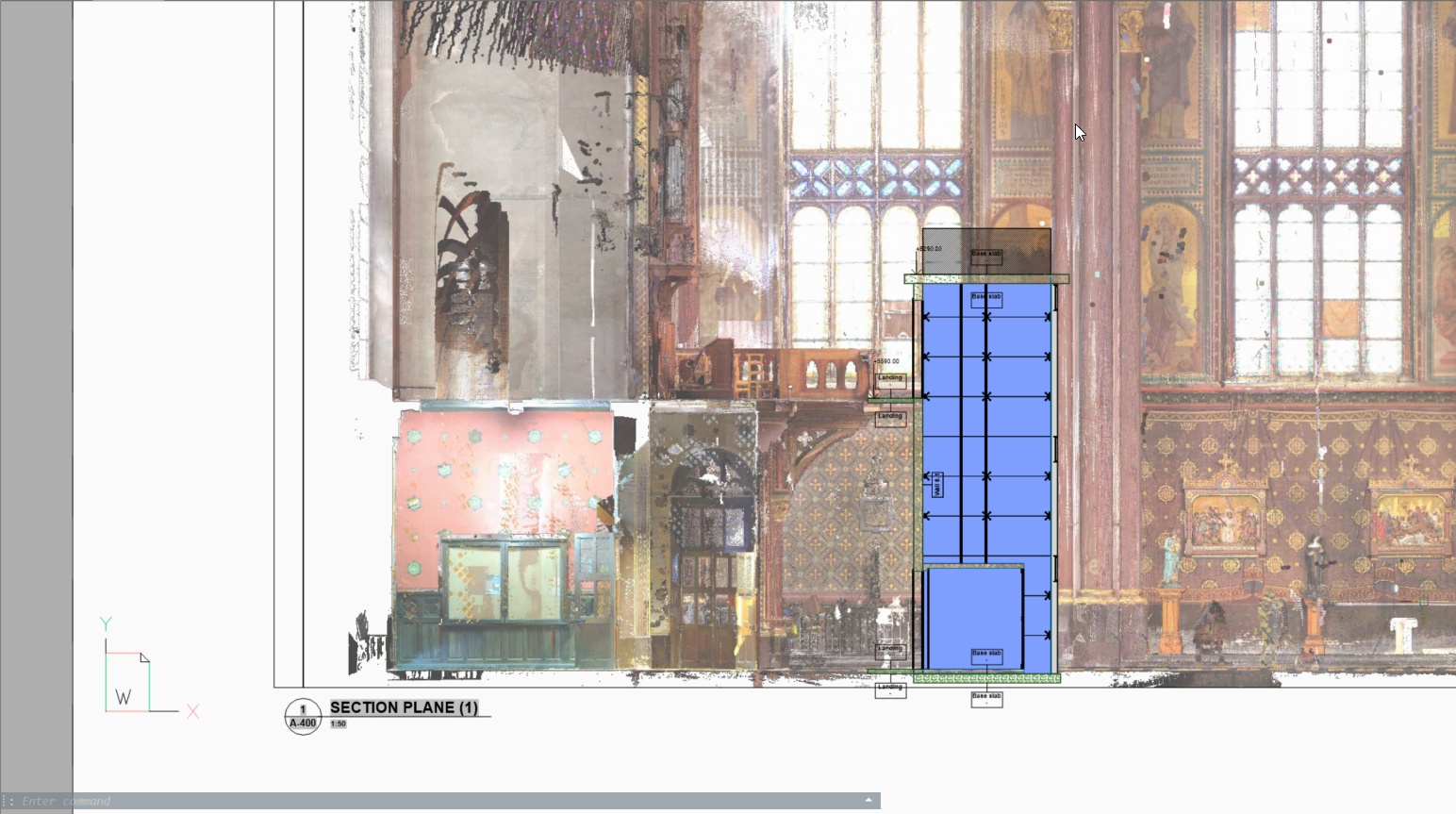
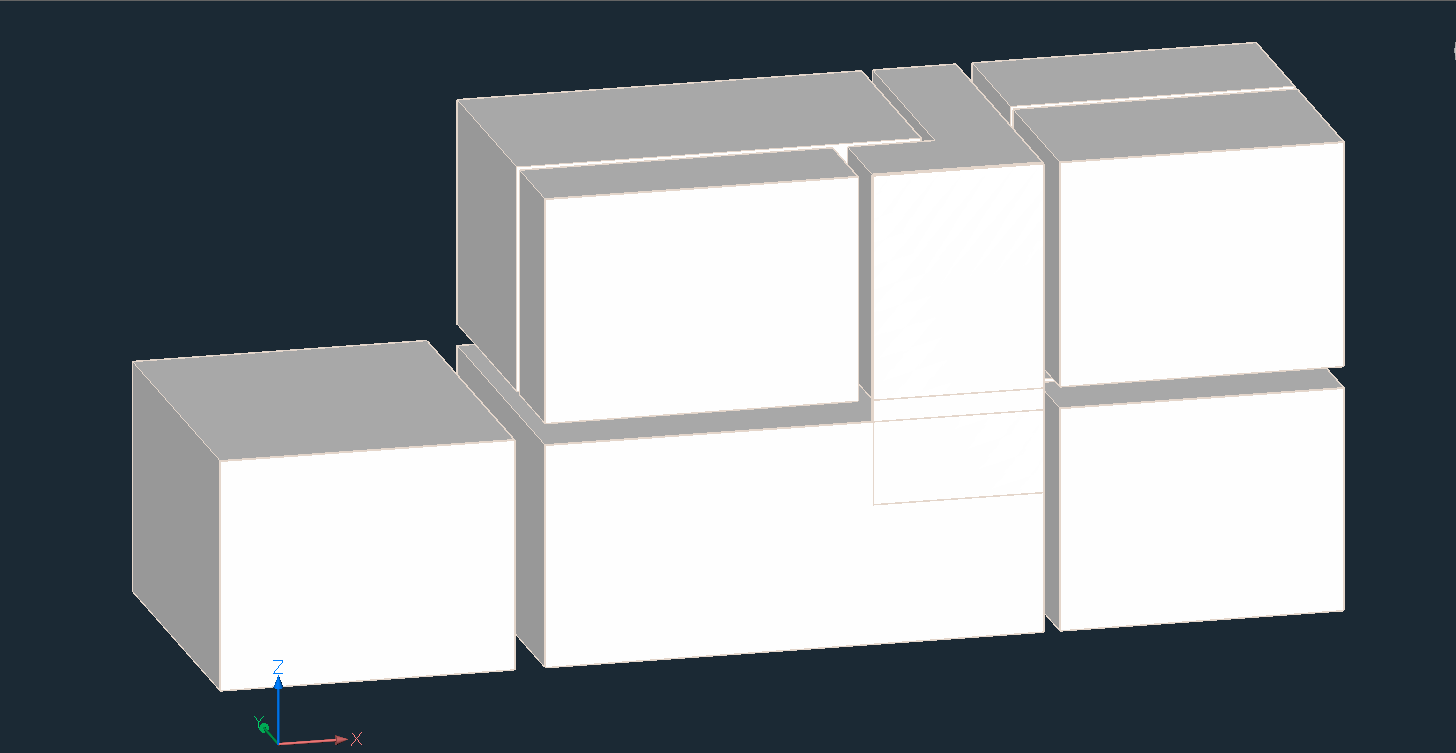
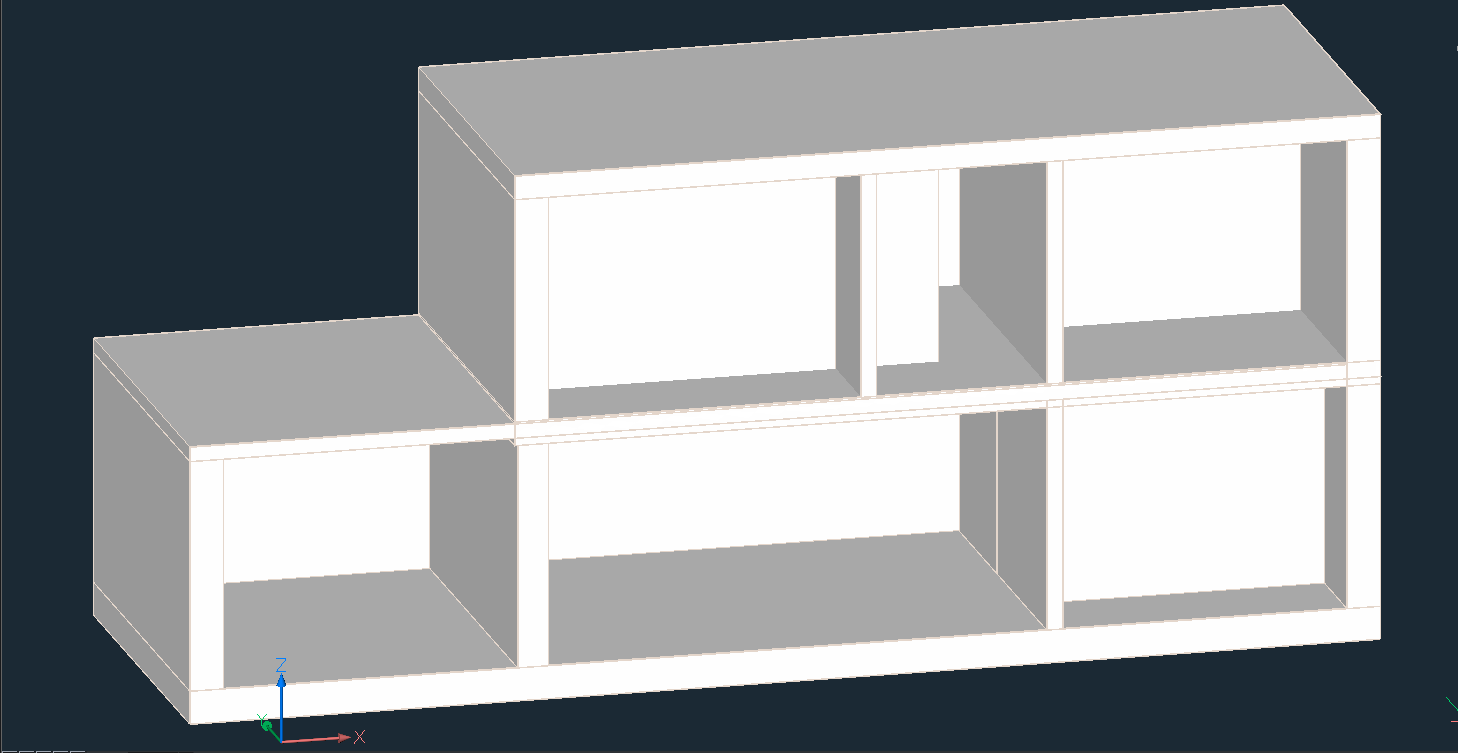
Note: Aquí, se proporciona un flujo de trabajo para convertir un escaneo en un modelo de construcción. La nube de puntos (imagen superior) se convierte primero en un conjunto de sólidos, uno por habitación, utilizando resultados POINTCLOUDFITPLANAR unidos (imagen central). El comando BIMINVERTSPACES convierte estos sólidos temporales de habitación en un modelo de construcción con muros y losas a partir de la inversión de estos sólidos.
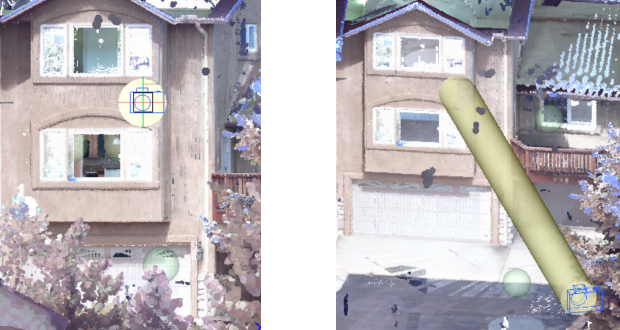
Colocar cilindro en burbujas
POINTCLOUDDEVIATION
- POINTCLOUDDEVIATION le permite evaluar visualmente el ajuste entre las estructuras planas y los puntos de la nube de puntos.

- Sección de nube de puntos del piso de una casa y un plano ajustado:
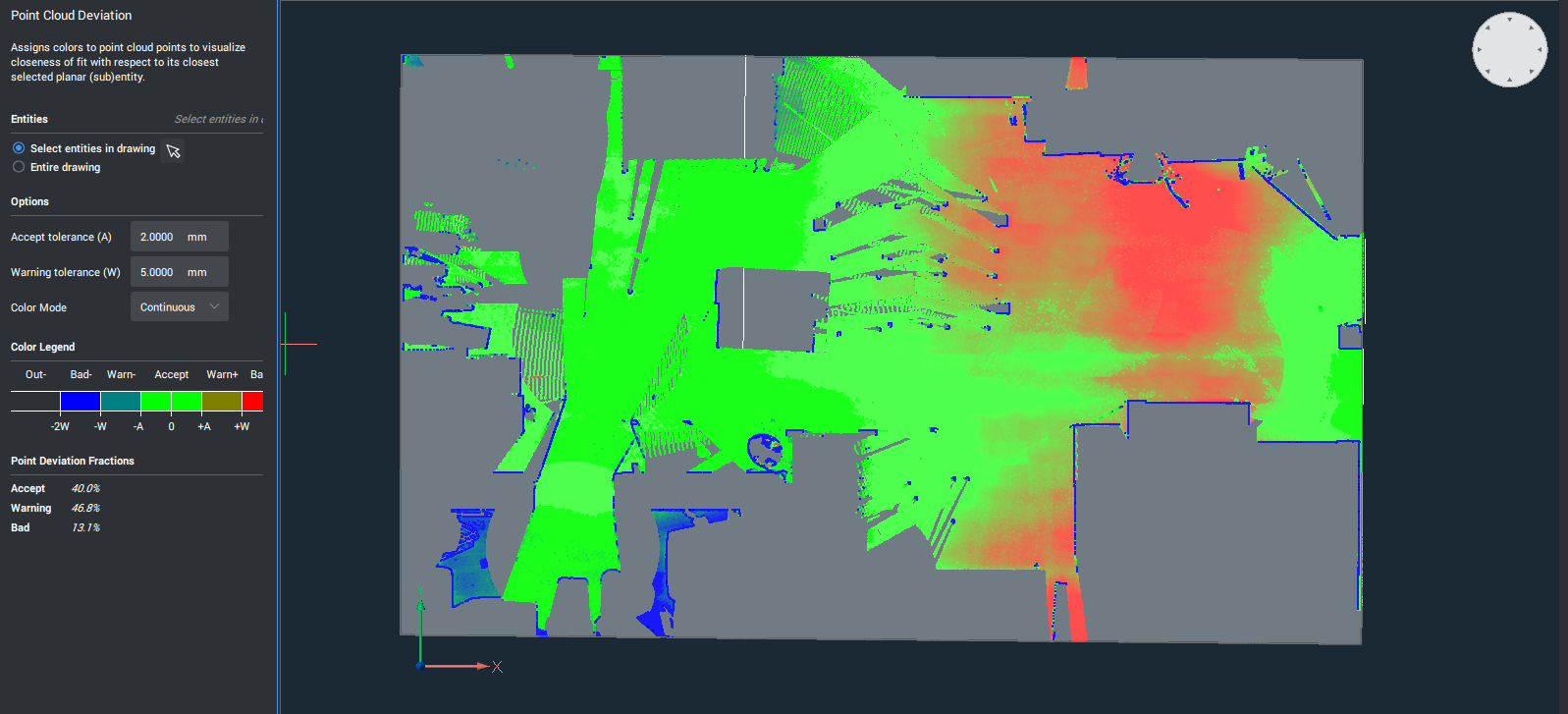
Las distancias de los puntos desde el suelo hasta el plano ajustado se visualizan mediante un mapa de colores. En el panel izquierdo, se proporciona una explicación de los colores (el verde es plano, el degradado de verde a azul aquí está más arriba del plano, el degradado de verde a rojo está más abajo del plano). Además, un resumen de los porcentajes de puntos en los que se presenta categoría (OK, nivel de alerta,…)