



POINTCLOUDCLASSIFY команда
Присваивает классы каждой точке облака точек.

Значок: 
Требования
- Классификатор облаков точек работает только под управлением ОС Windows.
- Графический процессор вашей системы должен быть совместим с CUDA.Note: Проверить, совместим ли ваш GPU с CUDA, можно здесь.
- В системе должна быть установлена CUDA 11.8. Загрузите версию для Windows отсюда и Запустите от имени администратора.
- Загрузите библиотеки классификаторов отсюда. Распакуйте архив и скопируйте содержимое папки pointcloud_classifier_windows в ту же папку, что и bricscad.exe.Important: После копирования библиотек классификаторов необходимо повторно перезапустить BricsCAD.
Если все перечисленные требования выполнены, то команда POINTCLOUDCLASSIFY запустит классификатор.
Метод
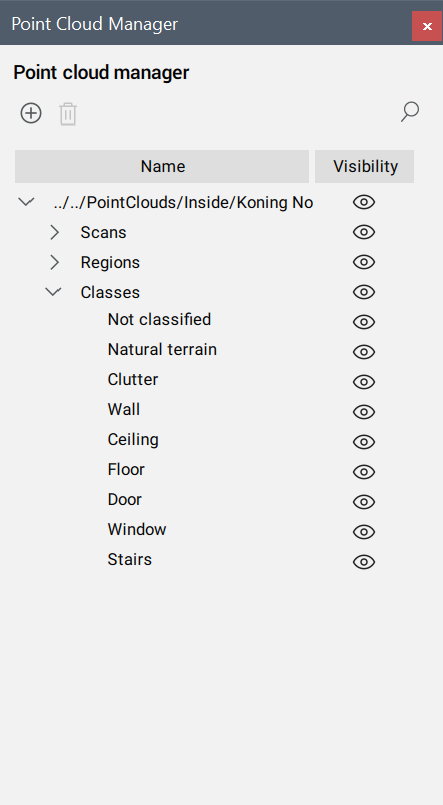
После вызова команды и выбора модели классификатор будет запущен в фоновом режиме, а его результаты появятся в панели Диспетчер облаков точек по мере готовности.
С классификатором можно использовать 4 различные модели:
- Внутри базовый: 10 основных классов для сканирования помещений (стены, потолок, пол, окна, двери, загромождения и т.д.).
- Внутри упрощенно: модель с 20 классами для сканирования внутри помещений (базовые классы + Наклонная крыша, Оборудование крыши, Стальная конструкция, Перила и т.д.).
- Внутри полностью: модель с 40 классами для сканирования внутри помещений (упрощенные классы + прокладка труб, прокладка проводов, радиаторы, сантехника и т.д.).
- Снаружи: модель с 5 классами для сканов вне помещения (рельеф, растительность, здание, асфальтированная дорога - твердый ландшафт, шум).
Note: Для моделей в помещениях результаты будут более точными, если имеется информация о помещении. Чтобы получить информацию о помещении, выполните следующие действия:
- С помощью команды POINTCLOUDDETECTFLOORS сформируйте объемы сечений, содержащие различные этажи здания. Вертикальные границы сечений могут быть неточными, поэтому при необходимости подкорректируйте их. Объемы сечений должны содержать пол и потолок этажа здания.
- Выберите одно из сгенерированных сечений и выполните команду POINTCLOUDDETECTROOMS для обнаружения различных помещений на выбранном этаже. Результаты появятся в разделе Здание на панели Менеджер облака точек.
Опции команды
- Внутри базовый
- Классифицирует облака точек с использованием базовых классов помещений.
- Внутри полностью
- Классифицирует облака точек, используя полные классы помещений.
- Внутри упрощенно
- Классифицирует облака точек с использованием упрощенных классов помещений.
- Классификация будет более точной, если имеется информация о помещении. Хотите ли Вы продолжить без информации о помещении?
- Позволяет решить, продолжать ли классификацию без информации о помещении.
- Снаружи
- Классифицирует облака точек с использованием классов наружной среды.