POINTCLOUDCLASSIFY comando
Asigna clases a cada punto de una nube de puntos.

Ícono: 
Requisitos
- El clasificador de nube de puntos solo se ejecuta en Windows.
- La GPU de su sistema debe ser compatible con CUDA.Nota: Puedes comprobar si tu GPU es compatible con CUDA aquí.
- Asegúrese de que el controlador NVIDIA más reciente esté instalado y en ejecución.
- La nube de puntos se procesa previamente en formato HSPC.
Preparación de las bibliotecas clasificadoras
- Descargue las bibliotecas de clasificadores desde aquí.
- Descomprima el archivo.
- Copie el contenido de la carpeta en la BricsCAD carpeta de instalación:
- Seleccione todos los archivos DLL y la carpeta UserDataCache dentro de las bibliotecas clasificadoras y, a continuación, arrástrelos y suéltelos sobre la carpeta de instalación. Se copiarán todos los archivos DLL y se actualizará la carpeta UserDataCache , con la carpeta de modelos PCC copiada dentro de ella.
- Como alternativa, primero puede copiar y pegar todos los archivos DLL dentro de las bibliotecas clasificadoras en la carpeta de instalación y, a continuación, copiar y pegar la carpeta de modelos PCC en la carpeta UserDataCache dentro de la carpeta de instalación.
La ruta predeterminada de la BricsCAD carpeta de instalación es: C:\Archivos de programa\Bricsys\BricsCAD V26 en_US.
Importante: Debe volver a ejecutarse BricsCAD después de copiar las bibliotecas clasificadoras.
Si se cumplen todos los requisitos anteriores y las bibliotecas se copian correctamente, el comando POINTCLOUDCLASSIFY ejecutará el clasificador.
Método
- indoorBasic: 10 clases básicas para escaneos en interiores (paredes, techo, suelo, ventanas, puertas, desorden, etc.).
- indoorSimplified: modelo con 20 clases para escaneos de interiores (clases básicas + Techo inclinado, Equipo de techo, Estructura de acero, Barandilla, etc.).
- indoorFull: modelo con 40 clases para escaneos de interiores (clases simplificadas + Instalación de tuberías, Instalación de cables, Radiador, Fontanería, etc.).
- Exterior: modelo con 5 clases para escaneos al aire libre (Terreno, Vegetación, Edificio, Carretera pavimentada - hardscape, Ruido).
- Carreteras (a partir de V25.2.03): modelo con 30 clases, utilizado para la clasificación de nubes de puntos típicamente capturadas a través de un escáner instalado en un automóvil (Vegetación, Edificios, Superficie de la carretera, Bordillos, Barandillas, Postes de señalización, Vehículos, etc.)
- Construcción (a partir de V25.2.03): modelo con 15 clases, utilizado para la clasificación de nubes de puntos capturadas de un sitio de construcción (Vegetación, Edificios, Carretera y paisaje duro, Vallado, Material de construcción, Zanjas, etc.)
Ejecute el comando, seleccione una entidad de nube de puntos y seleccione el modelo de clasificación. El clasificador empieza a ejecutarse en segundo plano.
Si la nube de puntos seleccionada ya contiene información de clasificación, el comando sobrescribe esta información. El cuadro de diálogo Sobrescribir clase aparece para solicitar confirmación para continuar.
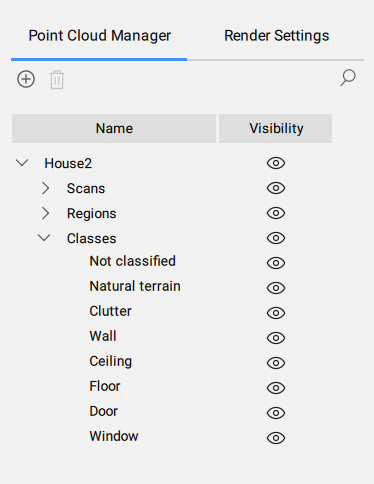
Cuando el proceso termina, los resultados aparecen en el panel Administrador de nubes de puntos bajo Clases (comando ABRIRPANELADMINNUBEDEPUNTOS).
- Ejecute el comando NUBEPUNTOSDETECTARPISOS para detectar los pisos de la nube de puntos. Las plantas detectadas se enumeran en el panel Administrador de nubes de puntos en Edificios.
- (Opcional) Para editar la selección de puntos asignados a un piso, haga clic con el botón derecho del ratón en el piso que aparece en el panel Administrador de nubes de puntos y seleccione la opción Modificar en el menú contextual (consulte también el artículo del comando POINTCLOUDMODIFYFLOOR ).
- Ejecute el comando POINTCLOUDDETECTROOMS para detectar habitaciones en las plantas seleccionadas. Los resultados aparecerán en Edificio en el panel Administrador de nubes de puntos .
Opciones dentro del comando
- Seleccionar en modelo
- Permite seleccionar uno de los modelos de clasificación.
- Seleccionar el modo de clasificación
- Permite seleccionar la configuración preestablecida para el clasificador.