NUVEMPONTOSVISUALIZADORBOLHA comando [POINTCLOUDBUBBLEVIEWER]
Abre o Visualizador de Bolha.

Descrição
Abre o Visualizador de Bolha para a Bolha da Nuvem de pontos com o índice associado especificado. O nome da Bolha selecionada (varredura ativa) é exibido na barra de título do visualizador.
Visualizador de Bolha
Dependendo do formato de arquivo original da Nuvem de pontos e do tipo de scanner usado durante a varredura (estática ou cinemática), as bolhas (esferas verdes) ou waypoints (esferas azuis) podem ser mostrados em todos os locais da digitalização. Nesses locais, você vai experimentar as representações visuais mais realistas, abrindo o Visualizador de Bolha.
Para abrir o visualizador de bolhas:
- Execute o comando NUVEMPONTOSVISUALIZADORBOLHA.
- Selecione a opção Abrir escaneamento no visualizador de bolhas no menu de contexto do escaneamento ou waypoint listado nas listas de escaneamentos ou waypoints do painel Point Cloud Manager.
Dados estruturados são capturados usando um scanner estático. Nesse caso, o local do scanner é conhecido, para cada ponto. Bolhas verdes são criadas nos locais do scanner estático a partir dos pontos digitalizados.
Dados não-estruturados são capturados usando um scanner cinemático. Nesse caso, não há um local exato de onde os pontos foram escaneados (varridos). Alguns dos scanners cinemáticos criam imagens panorâmicas em intervalos de tempo. Para essas imagens, a localização é conhecida e os pontos de referência (esferas azuis) são criados.
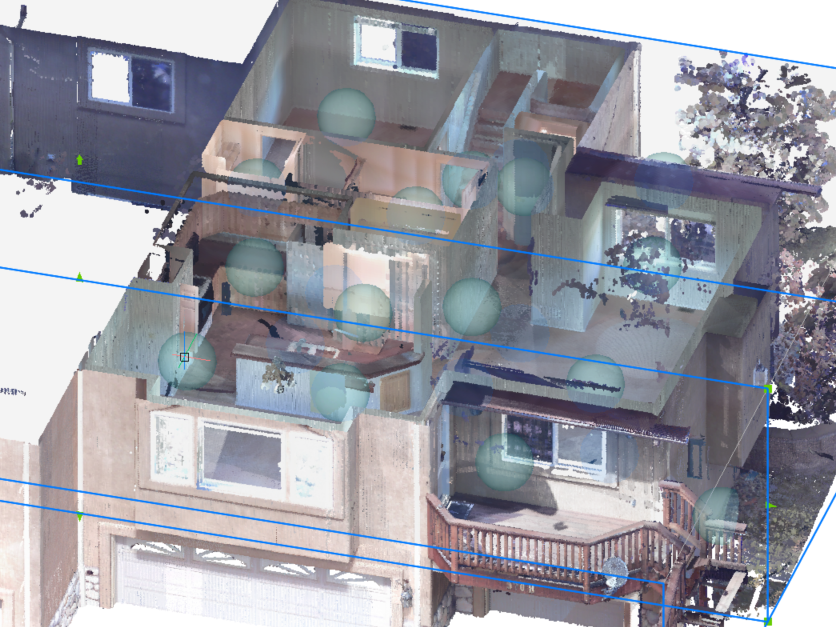
Indique um índice de bolhas no comando NUVEMPONTOSVISUALIZADORBOLHA ou clique duas vezes em uma das bolhas no Model Space para abrir o Visualizador de Bolha.
Você pode pressionar o botão médio e mover o mouse para ver a Nuvem de pontos em qualquer direção, a partir daquele local de digitalização.
Aumente e diminua o Zoom, usando a rodinha do mouse.

As escanerizações próximas são indicadas no Visualizador de Bolha por bolhas vermelhas. Passe o cursor sobre uma bolha para exibir o nome da varredura. Clique duas vezes em uma bolha para abrir a varredura no visualizador.

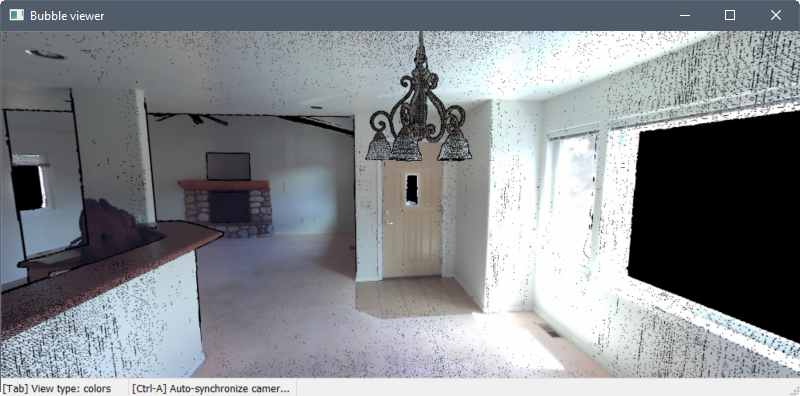
Pressione a tecla Tab para percorrer três modos visuais diferentes (tipos de vistas).
-
Os modos de cores e cores (profundidade) exibem os pontos como suas cores reais ou em escala de cinza, dependendo de como os dados foram digitalizados.
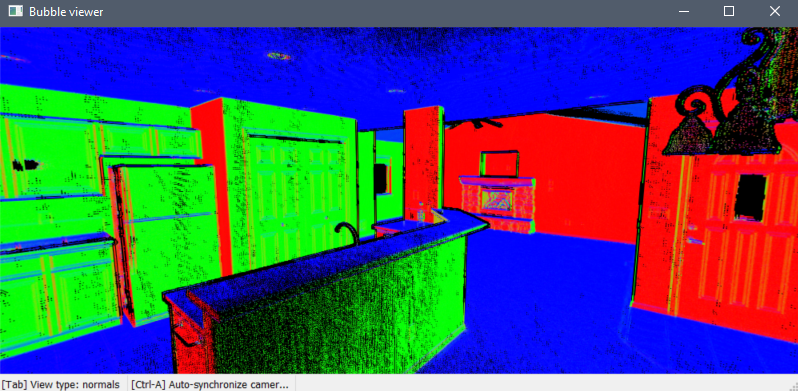
-
O modo das normais exibe os pontos em vermelho, verde ou azul de acordo com seus vetores normais. As cores correspondem aos eixos do UCS.
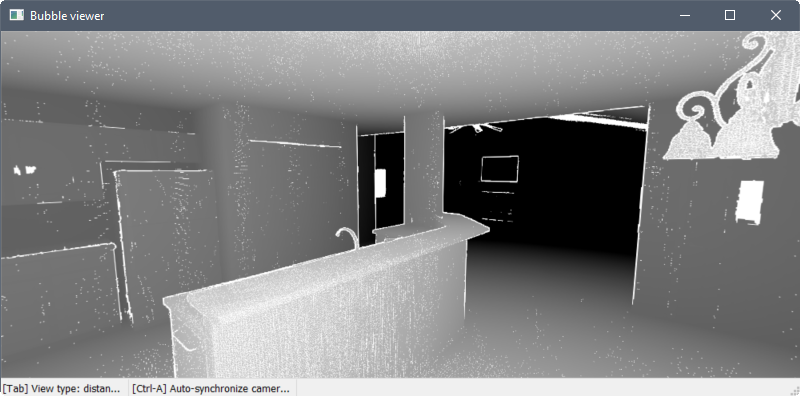
-
O modo de distâncias exibe os pontos do claro ao escuro à medida que a distância do local da varredura aumenta.
Sincronize a vista do desenho para coincidir com o Visualizador de Bolha pressionando Ctrl+A.
