POINTCLOUDCLASSIFY comando
Asigna clases a cada punto de una nube de puntos.

Ícono: 
Requisitos
- El clasificador de nube de puntos solo se ejecuta en Windows.
- La GPU de su sistema debe ser compatible con CUDA.Importante: En BricsCAD V25, el clasificador no es compatible con las GPU de arquitectura Blackwell de NVIDIA.Nota: Puedes comprobar si tu GPU es compatible con CUDA aquí.
- Asegúrese de que el controlador NVIDIA más reciente esté instalado y en ejecución.
Preparación de las bibliotecas clasificadoras
- Descargue las bibliotecas clasificadoras desde aquí.
- Descomprima el archivo.
- Copie el contenido de la carpeta en la BricsCAD carpeta de instalación:
- Seleccione todos los archivos DLL y la carpeta UserDataCache dentro de las bibliotecas clasificadoras y, a continuación, arrástrelos y suéltelos sobre la carpeta de instalación. Se copiarán todos los archivos DLL y se actualizará la carpeta UserDataCache , con la carpeta de modelos PCC copiada dentro de ella.
- Como alternativa, primero puede copiar y pegar todos los archivos DLL dentro de las bibliotecas clasificadoras en la carpeta de instalación y, a continuación, copiar y pegar la carpeta de modelos PCC en la carpeta UserDataCache dentro de la carpeta de instalación.
La ruta predeterminada de la BricsCAD carpeta de instalación es: C:\Archivos de programa\Bricsys\BricsCAD V25 en_US.
Importante: Debe volver a ejecutarse BricsCAD después de copiar las bibliotecas clasificadoras.
Si se cumplen todos los requisitos anteriores y las bibliotecas se copian correctamente, el comando POINTCLOUDCLASSIFY ejecutará el clasificador.
Método
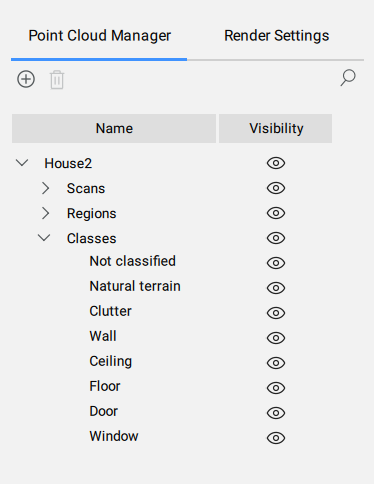
Cuando se llama al comando y se selecciona el modelo, el clasificador se ejecutará en segundo plano y los resultados aparecerán en el panel Administrador de nubes de puntos cuando estén listos.
Nota: Utilice el comando POINTCLOUDMANAGERPANELOPEN para abrir el panel Administrador de nubes de puntos .
Hay 4 modelos diferentes para usar con el clasificador:
- indoorBasic: 10 clases básicas para escaneos en interiores (paredes, techo, suelo, ventanas, puertas, desorden, etc.).
- indoorSimplified: modelo con 20 clases para escaneos de interiores (clases básicas + Techo inclinado, Equipo de techo, Estructura de acero, Barandilla, etc.).
- indoorFull: modelo con 40 clases para escaneos de interiores (clases simplificadas + Instalación de tuberías, Instalación de cables, Radiador, Fontanería, etc.).
- Exterior: modelo con 5 clases para escaneos al aire libre (Terreno, Vegetación, Edificio, Carretera pavimentada - hardscape, Ruido).
- Carreteras (a partir de V25.2.03): modelo con 30 clases, utilizado para la clasificación de nubes de puntos típicamente capturadas a través de un escáner instalado en un automóvil (Vegetación, Edificios, Superficie de la carretera, Bordillos, Barandillas, Postes de señalización, Vehículos, etc.)
- Construcción (a partir de V25.2.03): modelo con 15 clases, utilizado para la clasificación de nubes de puntos capturadas de un sitio de construcción (Vegetación, Edificios, Carretera y paisaje duro, Vallado, Material de construcción, Zanjas, etc.)
Nota: En el caso de los modelos de interior, los resultados serán más precisos si se dispone de información sobre la habitación. Para obtener información de la habitación, siga estos pasos:
- Ejecute el comando NUBEPUNTOSDETECTARPISOS para detectar los pisos de la nube de puntos. Las plantas detectadas se enumeran en el panel Administrador de nubes de puntos en Edificios.
- (Opcional) Para editar la selección de puntos asignados a un piso, haga clic con el botón derecho del ratón en el piso que aparece en el panel Administrador de nubes de puntos y seleccione la opción Modificar en el menú contextual (consulte también el artículo del comando POINTCLOUDMODIFYFLOOR ).
- Ejecute el comando POINTCLOUDDETECTROOMS para detectar habitaciones en las plantas seleccionadas. Los resultados aparecerán en Edificio en el panel Administrador de nubes de puntos .
Opciones dentro del comando
- Seleccionar en modelo
- Permite seleccionar uno de los modelos de clasificación.
- Seleccionar el modo de clasificación
- Permite seleccionar la configuración preestablecida para el clasificador.