点群を使用した作業
点群の前処理、管理、アタッチ
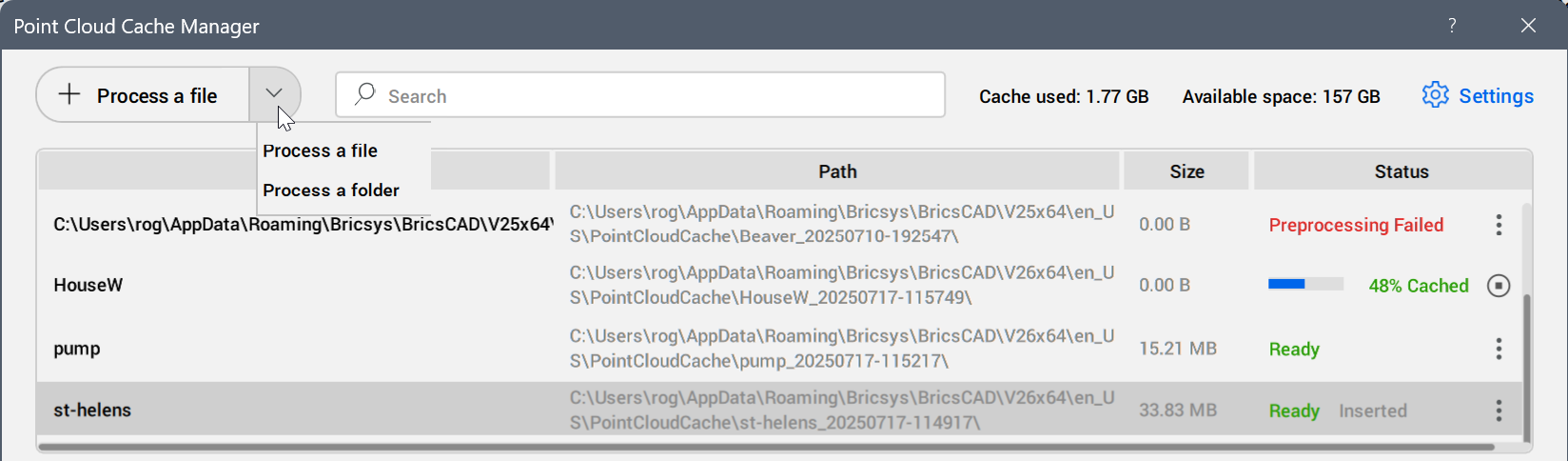
点群の前処理を行うには、POINTCLOUDREFERENCEコマンドで点群キャッシュマネージャダイアログボックスを開き、ファイルを処理またはフォルダーを処理を選択します。また、POINTCLOUDATTACHコマンドを使用することもできます。
点群の前処理は、保存済みかどうかに関わりなく DWGファイルから開始できます。入力点群(単位または挿入点なし)を指定するよう求められます。
すべてのデータが読み取られ、処理されてディスクに書き込まれ、LOGファイルが作成されます。進行状況が追跡され、点群キャッシュマネージャダイアログボックスに表示されます。
点群の前処理には2つのステップがあります。まず最初にポイントの処理を行い、次に表示を最適化します。
点群ファイルと360度イメージは、ほぼ瞬時に図面で利用可能になり、バブルが紫色で表示されます。これらのバブルには、法線やポイントごとの深さなどの情報は含まれません。すべての情報の準備が整うまで、バックグラウンドでバブルの前処理が続行されます。準備が完了すると、バブルが緑色で表示されます。
前処理の進行状況は、点群に関連するサブフォルダー内のログファイルに記録されます。このサブフォルダーは、カレントの点群キャッシュパス(POINTCLOUDCACHEFOLDERシステム変数で設定可能)内にあります。カレントの点群キャッシュのデフォルトパスはC:\Users\%username%\AppData\Roaming\Bricsys\BricsCAD\V26x64\en_US\PointCloudCache\Folder_for_processed_pointcloudです。
- ファイルを検索するか、上部の検索バーで、キャッシュされた点群のリストをフィルタリングします。
- 詳細セクションで、選択した点群で使用可能なすべてのメタデータを表示します。
- データ名、単位、GIS座標系を編集できます。
- 以前に前処理された点群キャッシュデータを含むサブフォルダー(別のBricsCAD点群キャッシュフォルダーにあるもの、またはシェル実行可能ファイルpreprocessor.exeで前処理)は、POINTCLOUDCACHEFOLDERシステム変数で指定されているフォルダー(デフォルト値: C:\Users\%username%\AppData\Roaming\Bricsys\BricsCAD \V26x64\en_US\PointCloudCache)にコピーすることができ、キャッシュファイルは次回点群キャッシュマネージャダイアログボックスを開いたときに使用できます。点群キャッシュフォルダー内の各サブフォルダーは、点群キャッシュマネージャダイアログボックス内に項目があります。
- HSPC形式で処理されたファイルのポイントクラウドキャッシュが指定された場所に見つからない場合、トレイ通知がアタッチメントパネルへリダイレクトします。ここから、キャッシュ フォルダーの新しいパスを選択できます。
キャッシュされた点群のアタッチを開始するには、アタッチボタンを使用します。点群をアタッチダイアログボックスが開きます。点群インスタンスの挿入点、尺度、回転、単位、GIS座標系を設定できます。また、地理データを使用することもできます (利用可能な場合)。
位置合わせ
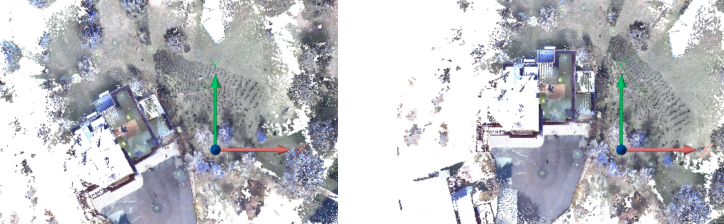
POINTCLOUDALIGNコマンドは、点群を自動的に回転させ、X軸とY軸に最適に配置します(点は壁など垂直な平面にある必要があります)。最適なアライメントを決定するため、壁を含む点群の最も関連性の高い領域を指定するように求められます。
バブルビューア
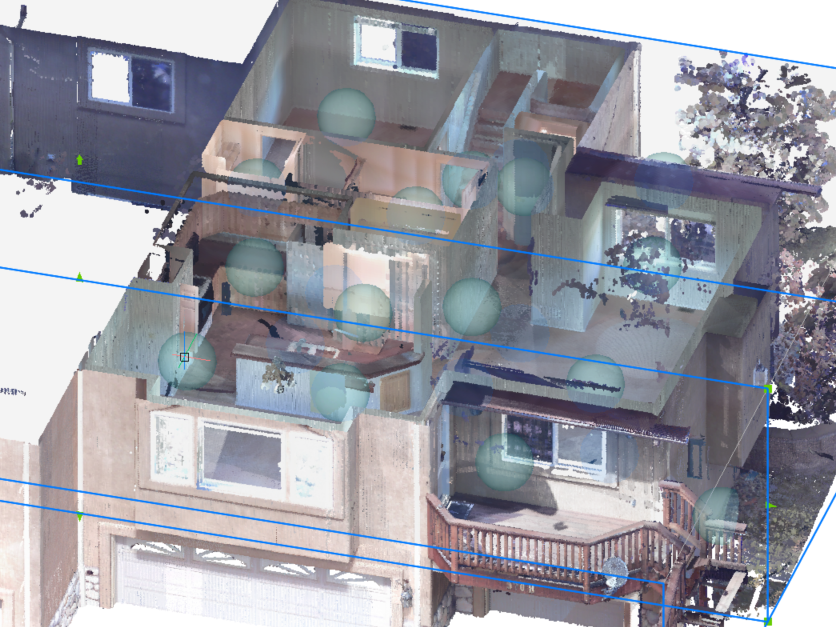
点群の元のファイル形式とスキャン中に使用されたスキャナのタイプ(静止画スキャナまたはキネマティックスキャナ)によっては、すべてのスキャン場所にバブル(緑色の球体)または中間点(青色の球体)が表示される場合があります。これらの場所でバブルビューアを開き、最もリアルな視覚表現を得られます。
バブルビューアを開くには:
- POINTCLOUDBUBBLEVIEWERコマンドを実行します。
- 点群マネージャーパネルのスキャンリストまたは中間点リスト内のスキャンまたは中間点のコンテキストメニューから、バブルビューアでスキャンを開くオプションを選択します。
構造化データは、静止画スキャナを使用してキャプチャされます。この場合、すべてのポイントについてスキャナの位置がわかっています。スキャンされたポイントからの静止画スキャナの位置に緑色のバブルが作成されます。
非構造化データは、キネマティックスキャナを使用してキャプチャされます。この場合、ポイントの正確なスキャン位置はありません。一部のキネマティックスキャナは、時間間隔でパノラマ画像を作成します。このような画像では位置がわかっているため、中間点(青色の球体)が作成されます。
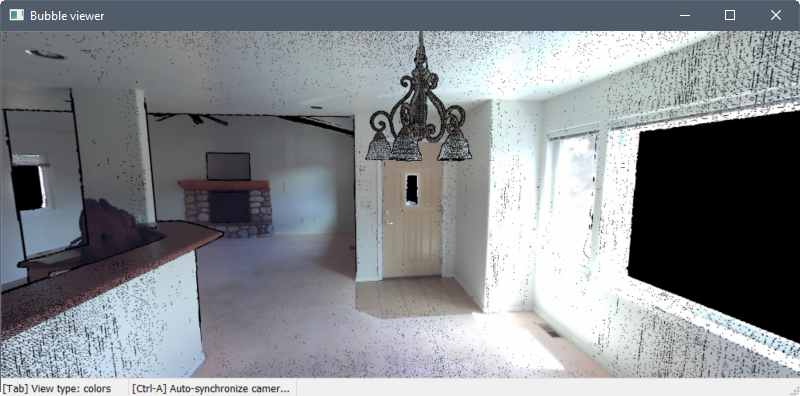
POINTCLOUDBUBBLEVIEWERコマンドでバブルインデックスを指定するか、モデル空間内のバブルの1つをダブルクリックしてバブルビューアを開きます。
マウスの中央ボタンを押したままカーソルを動かし、スキャン位置から任意の方向の点群を表示します。
マウスホイールを使用して、ズームイン、ズームアウトします。

近くのスキャンは、赤色のバブルでバブルビューアに示されます。バブルにカーソルを合わせると、スキャン名が表示されます。バブルをダブルクリックすると、スキャンがビューアで開きます。

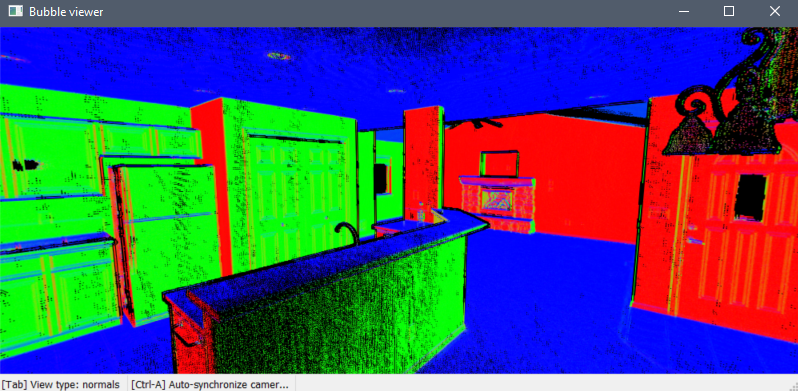
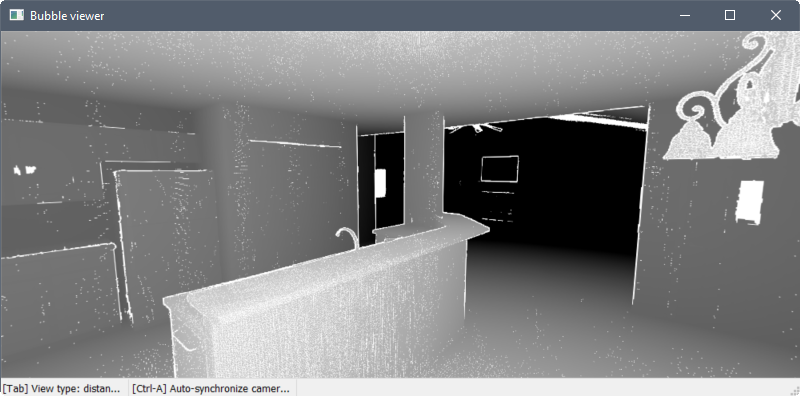
Tabキーを押して、3種類の表示モード(ビュータイプ)を切り替えます。
-
色モードと色(深さ)モードでは、データのスキャン方法に応じて、ポイントが実際の色またはグレースケールで表示されます。
-
法線モードでは、法線ベクトルに従ってポイントが赤、緑、または青で表示されます。色はUCS軸に対応しています。
-
距離モードでは、スキャン位置からの距離が長くなるにつれて、明から暗へポイントが表示されます。
Ctrl+Aを押して、バブルビューアに合わせて図面ビューを同期させます。

図形スナップ
点群の近接点図形スナップ(PCNEARESTコマンド/3DOSMODEシステム変数)を使用すると、関連する点群ポイントを選択する操作が大幅に向上します。現在の視点からカーソルに向かって仮想円柱を使用します。
仮想円柱の半径は、図形スナップの吸着ボックス設定(APBOXシステム変数)によって定義されます。
図形スナップメニュー、ツールバー、設定で、他の3D図形スナップとともに点群の近接点図形スナップ(3DOSMODEシステム変数のビットコード128)をオンにします。
書き出し
POINTCLOUDEXPORTコマンドを使用すると、点群の表示部分をPTS、HSPC、またはLAZファイルに書き出せます。
フロア検出
POINTCLOUDDETECTFLOORSコマンドは、建物の点群から床を検出します。類似のZ座標を持つ点のリージョンに基づき検出します。検出した床は、建物の点群を把握するのに役立ちます。
- 床を正確に検出するために、建物に関係のない点群(周囲の環境、他の建物など)を非表示にします。POINTCLOUDCROP、POINTCLOUDREGION、POINTCLOUDCLASSIFYなどの点群コマンドを使用します。点群マネージャーパネルで、関係ない分類の表示をオフにします。
- POINTCLOUDFITROOMSコマンドは、点群スキャンからBIMワークフローのステップとして使用されます。詳細については、点群スキャンからBIMワークフローの記事を参照してください。
点群投影
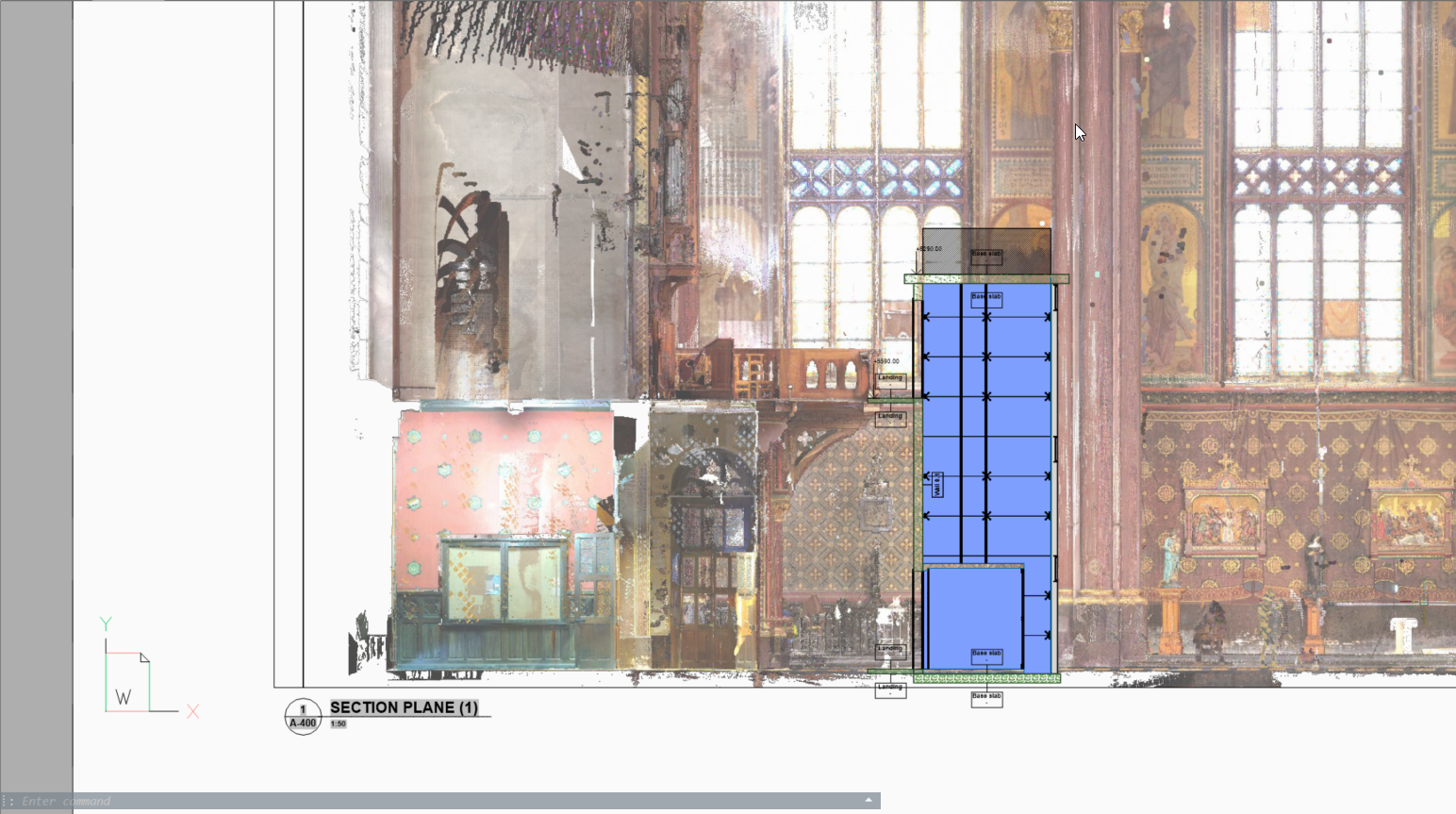
POINTCLOUDPROJECTSECTIONコマンドを使用して、さまざまな壁検出オプションを選択して点群のボリューム断面から壁を検出します。BIMSECTIONコマンドを使うと、断面ボリュームを作成することができます。これらの断面から2D線分を生成して、2Dの平面図や立面断面図を作成できます。このプロセスはバックグラウンドで実行され、複数の断面をキューに入れて処理できます。これにより、このコマンドをすべての断面に対して完全な解像度で実行できます。
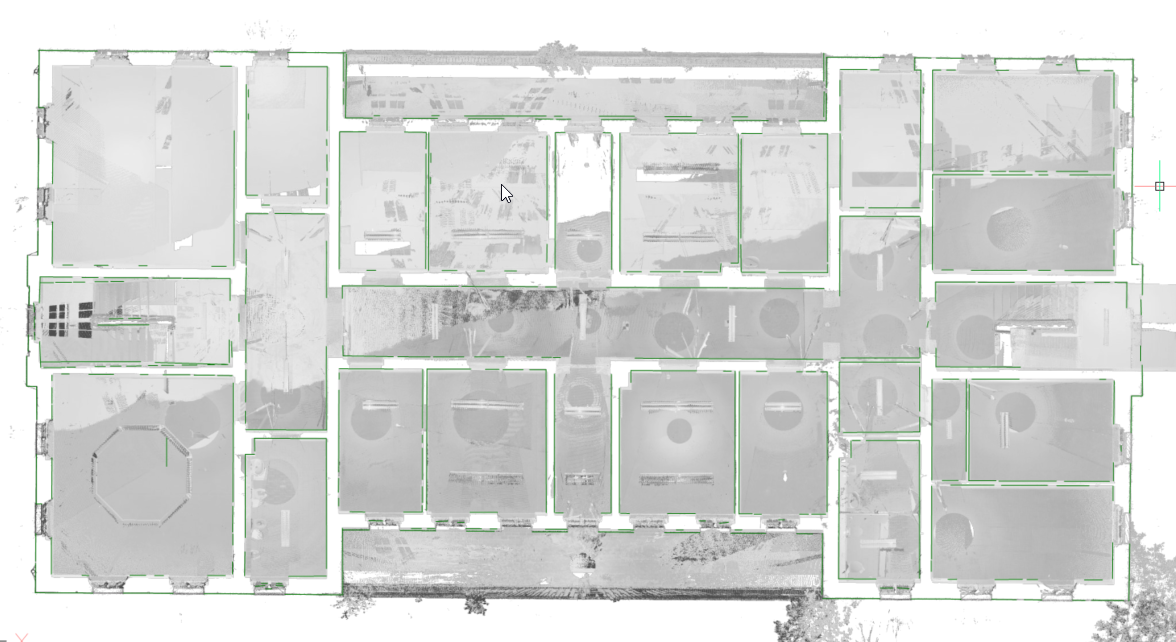
同時に、ラスターイメージも生成し、背景イメージを作成します。場合によっては、既存の建物を再作成する必要はありません。背景イメージがあると、設計ドキュメントについての理解が深まります。これらのイメージは、作成した2D形状を検証するために使用できますが、高品質スキャンされたイメージはグラフィック素材として使用することもできます。例えば、歴史的建造物に現代技術による修理等を施す改修プロジェクトで、BIMモデルの背景イメージとして使用します。
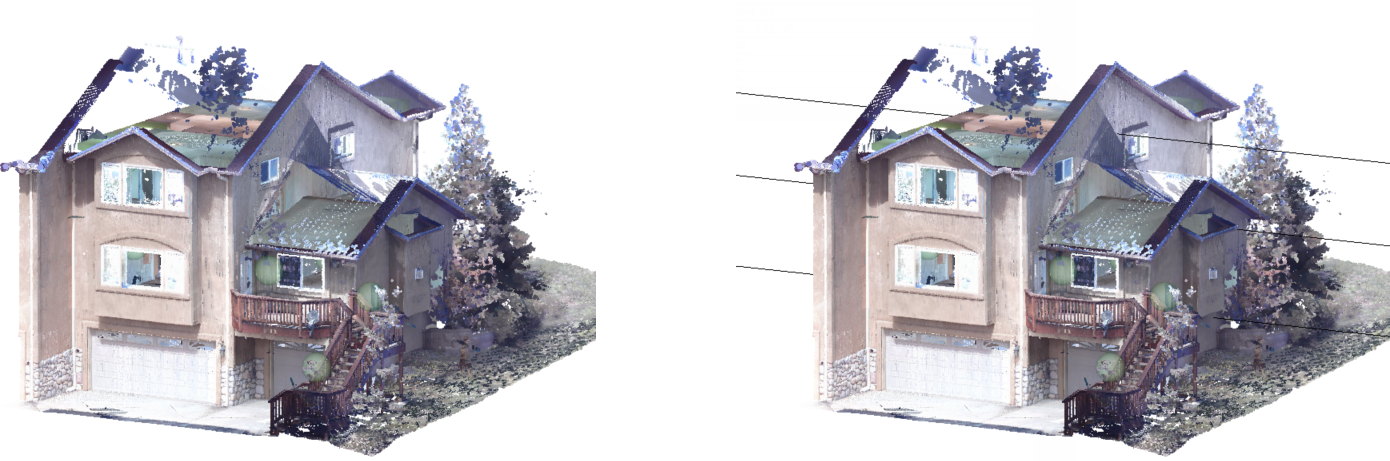
平面フィット
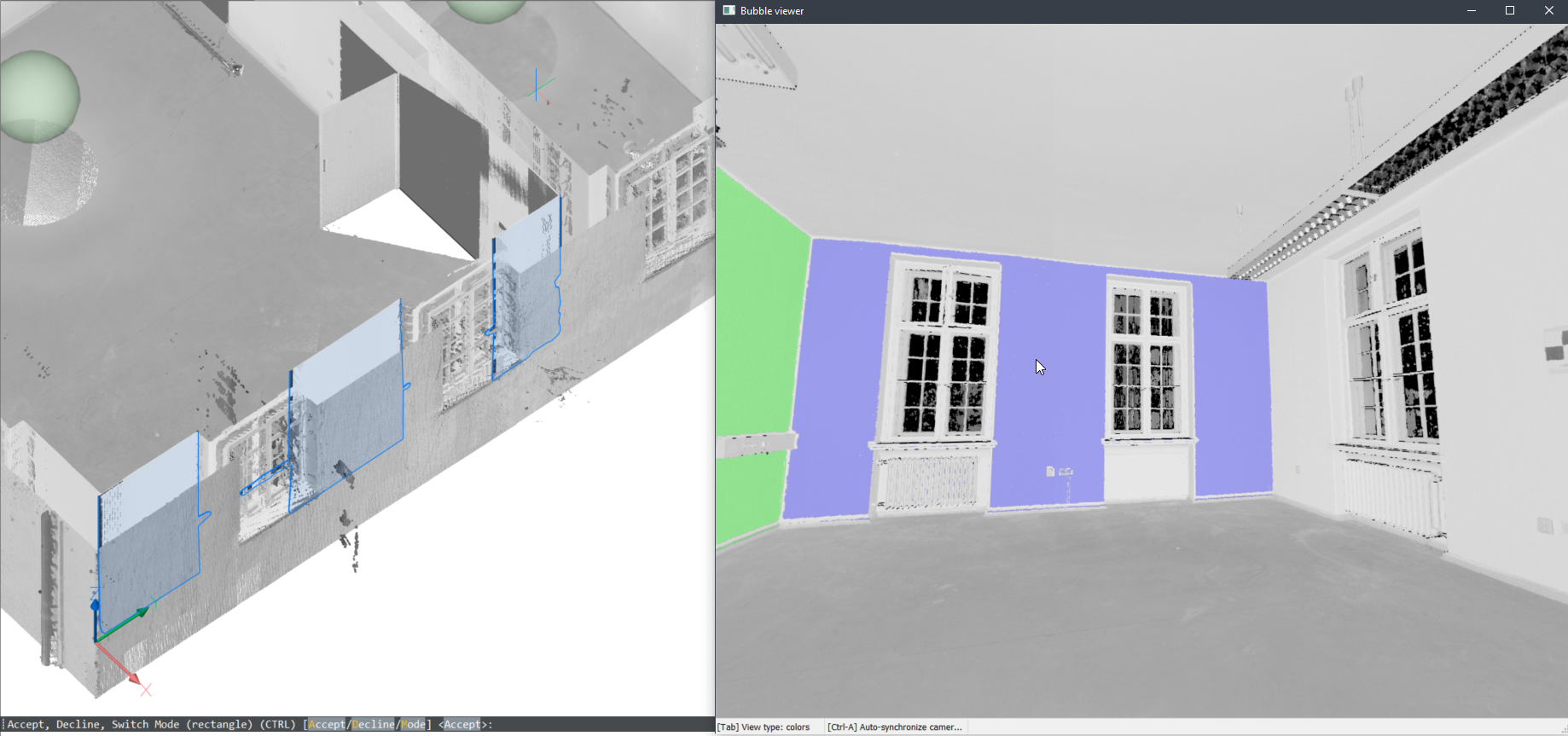
POINTCLOUDFITPLANARコマンドを使用して、点群に基づき3Dジオメトリを作成できます。点群内の1点(シード点)を選択すると、平面サーフェスまたはソリッドが作成されます。シード点と同じ平面上にある点を検出するには、点群図形のプロパティとして設定できるしきい値を使用します。Shiftキーを押したまま部屋の隣接する壁を選択すると、フィットした平面が延長/トリムされ、閉じたサーフェスが形成されます。
- 開口部を選択すると、ドアや窓の開口部を考慮することができます(バブルビューアのみ)。
- 境界を調整することで、平面的な境界の輪郭を調整することができます。
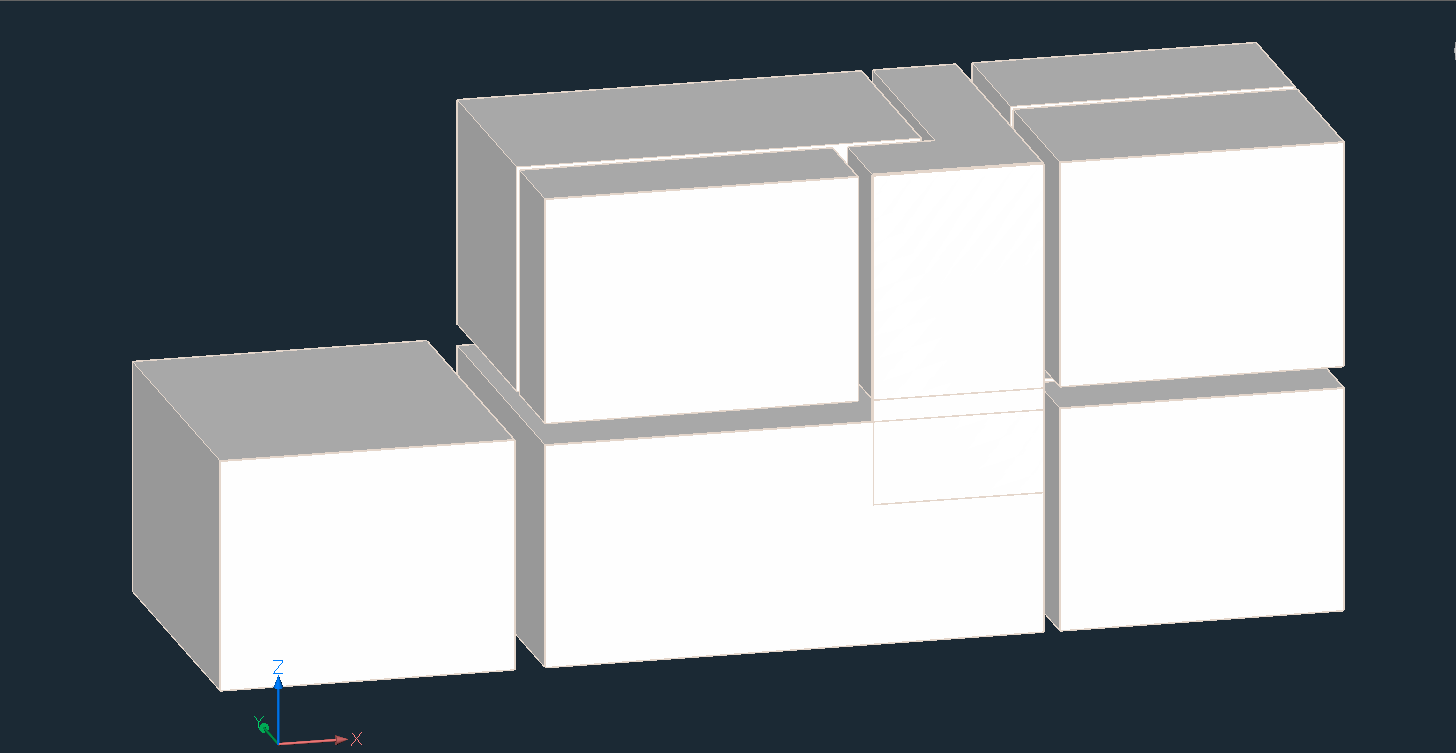
- ステッチサーフェスでは、複数のフィットした平面の結果をステッチして、例えば、後でBIMINVERTSPACEコマンドで使用できるソリッドにすることができます。
- バブルビューで
-
コマンドを起動する前にバブルビューアを開いていた場合、BricsCADではバブルビューアで平面シード点を選択することを想定しています。カーソル位置に平面の方向がプレビュー表示されます。クリックすると、バブルビューアでもモデルビューでもプレビューが表示されます。Ctrlキーを押すと、2つの形状表現を切り替えることができます。
注: セレクトモードのままでは、バブルの対応点が紫色で表示されます。これらの点は、ユーザーが生成された結果を受け入れると、緑色で表示されます。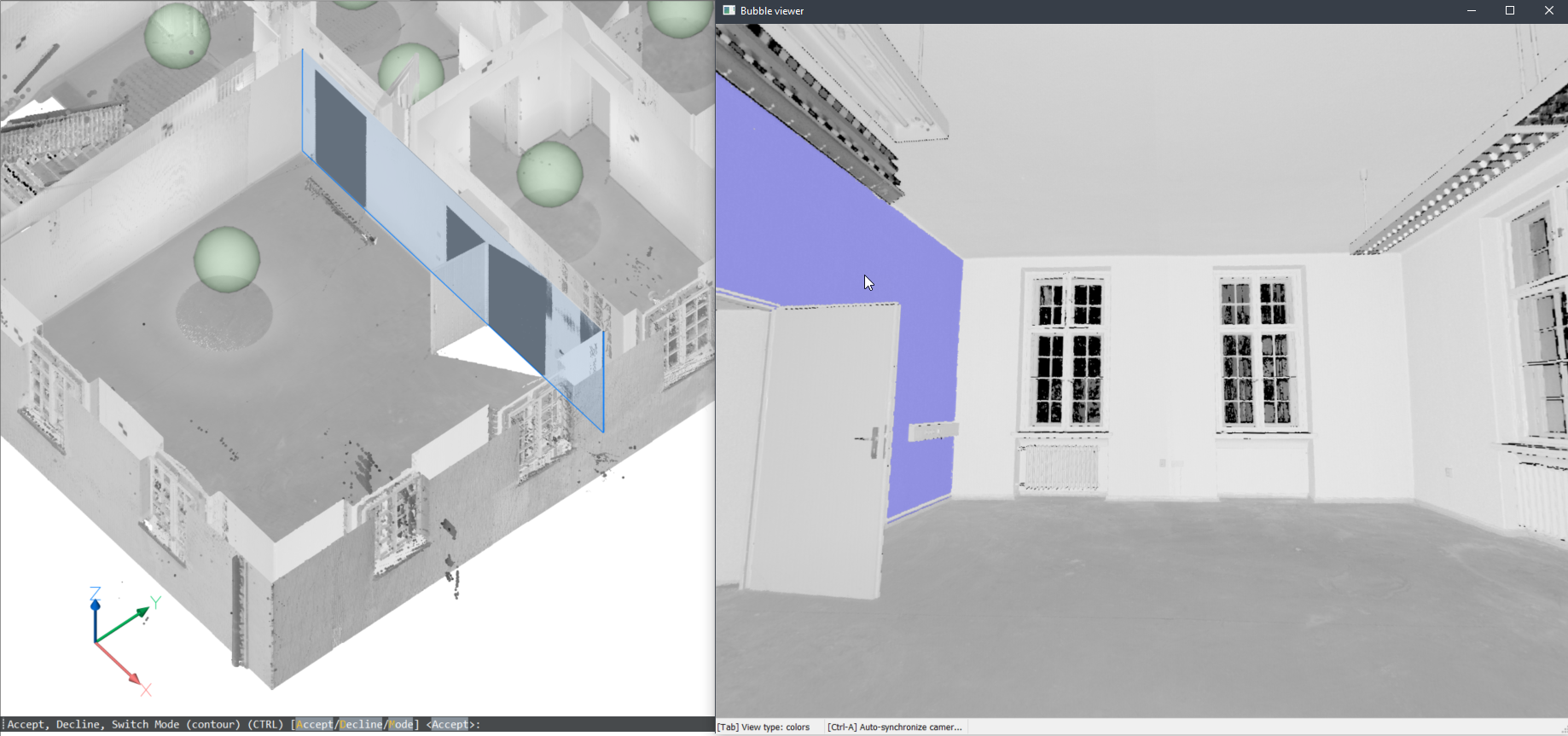
- モデル空間
- バブルビューアが開いていないときに、モデル空間でこのコマンドを使用することができます。BricsCADでは、モデル空間で点群のポイントを選択するよう求められます。点群の表示部分のサイズによっては、バブルビューア内でコマンドを実行する場合に比べて時間がかかる場合があります。ただし、これには複数のスキャン位置を検索することで2つの利点があります。
- 異なるスキャンの部品を組み合わせることで、より大きな表面を作成できます。
- 壁やスラブの厚さを検出できます。
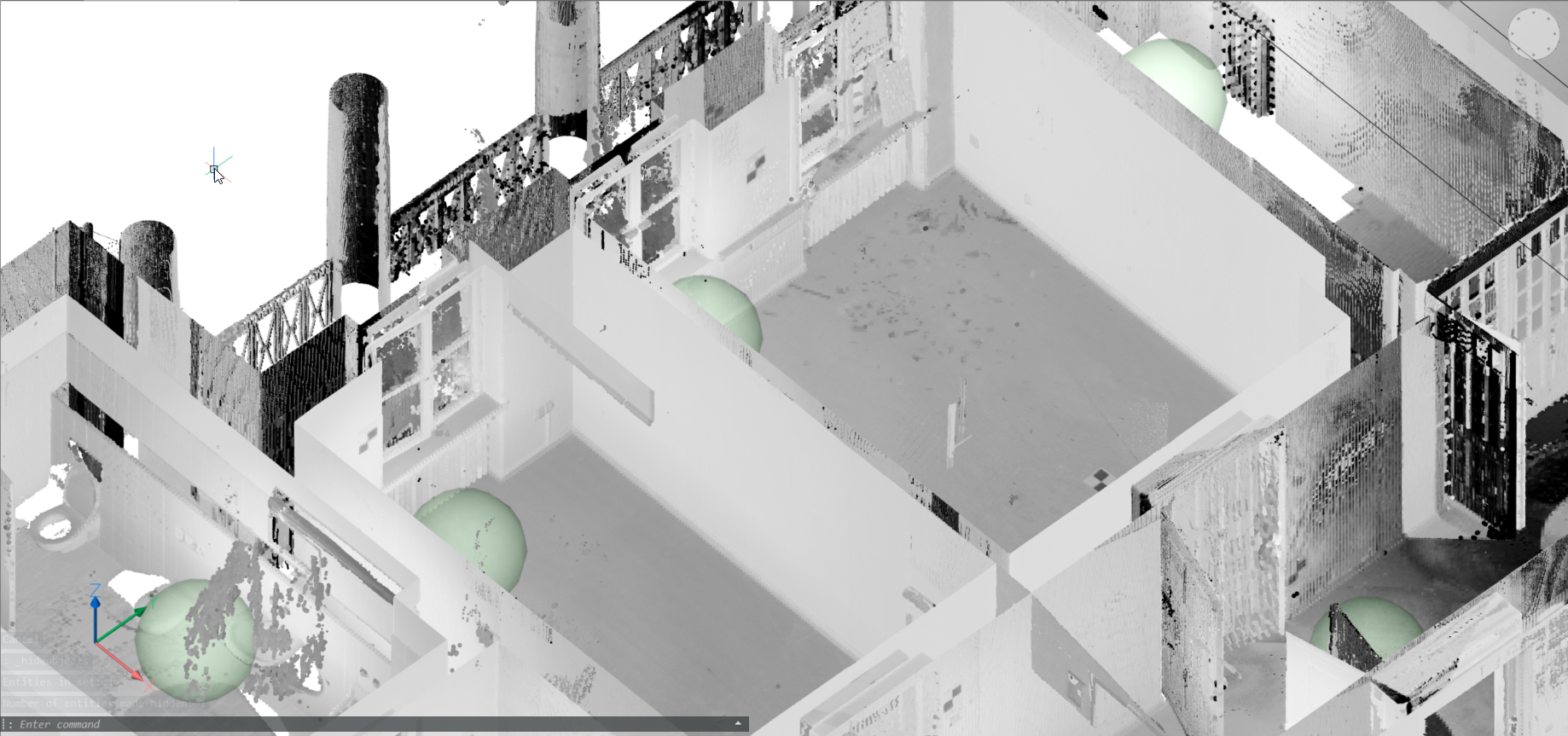
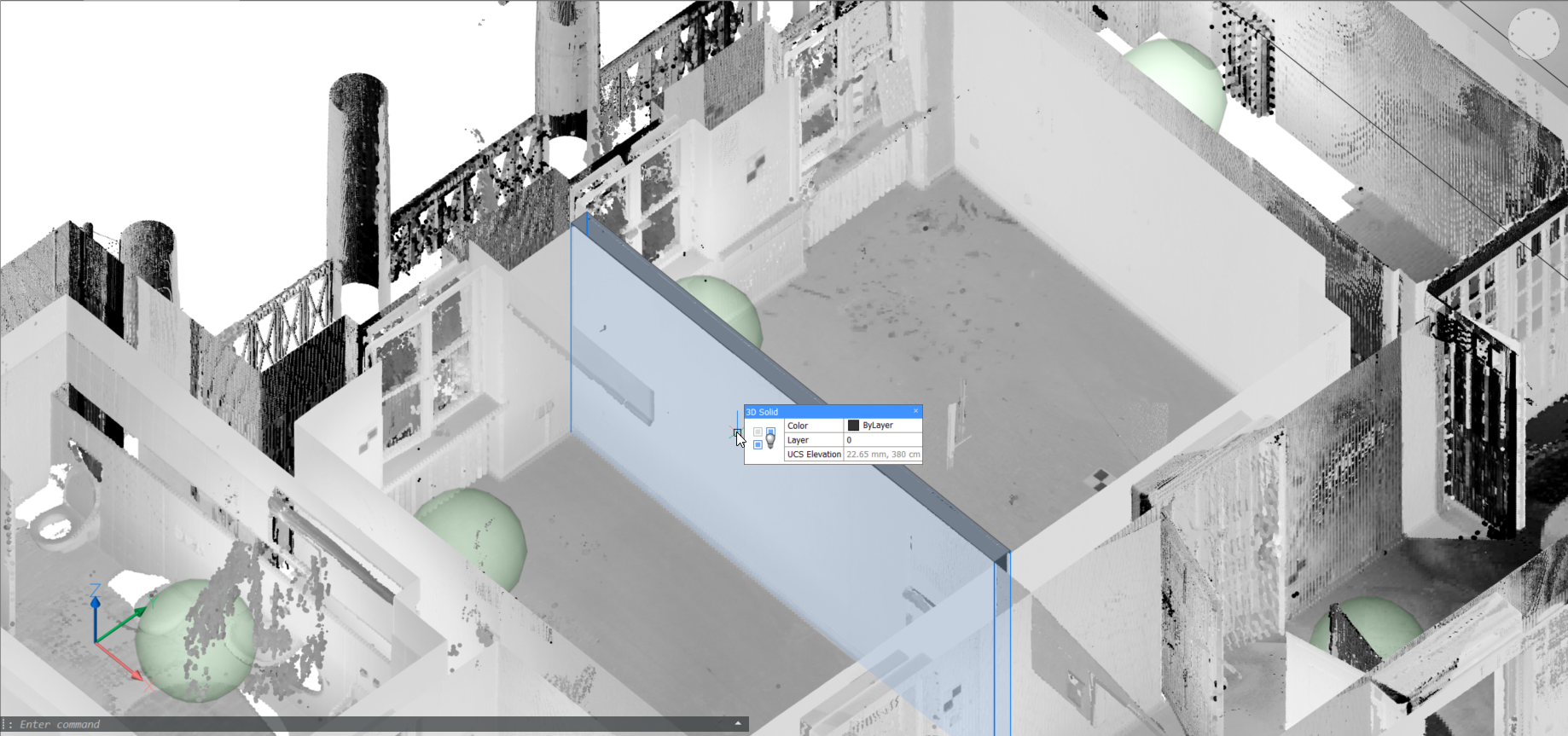
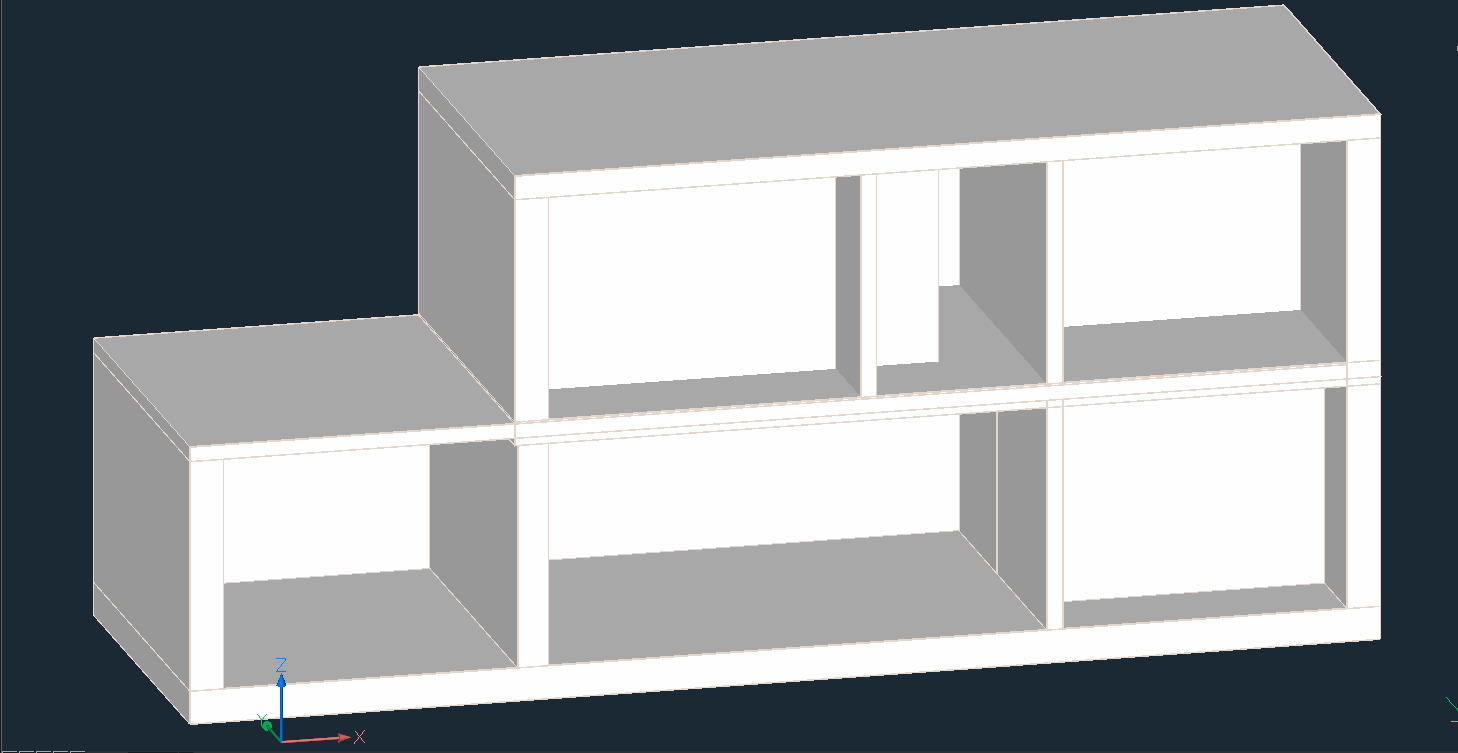
注: ここでは、スキャンを建物モデルに変換するワークフローを提供します。点群(上図)を平面フィットでスティッチした結果(中図)を用いて、部屋ごとに1つのソリッドに変換するワークフローです。BIMINVERTSPACESコマンドは、この仮の部屋ソリッドを反転して壁やスラブを持つ建物モデルに変換します。
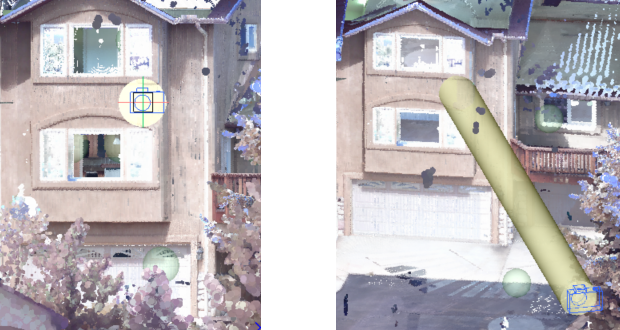
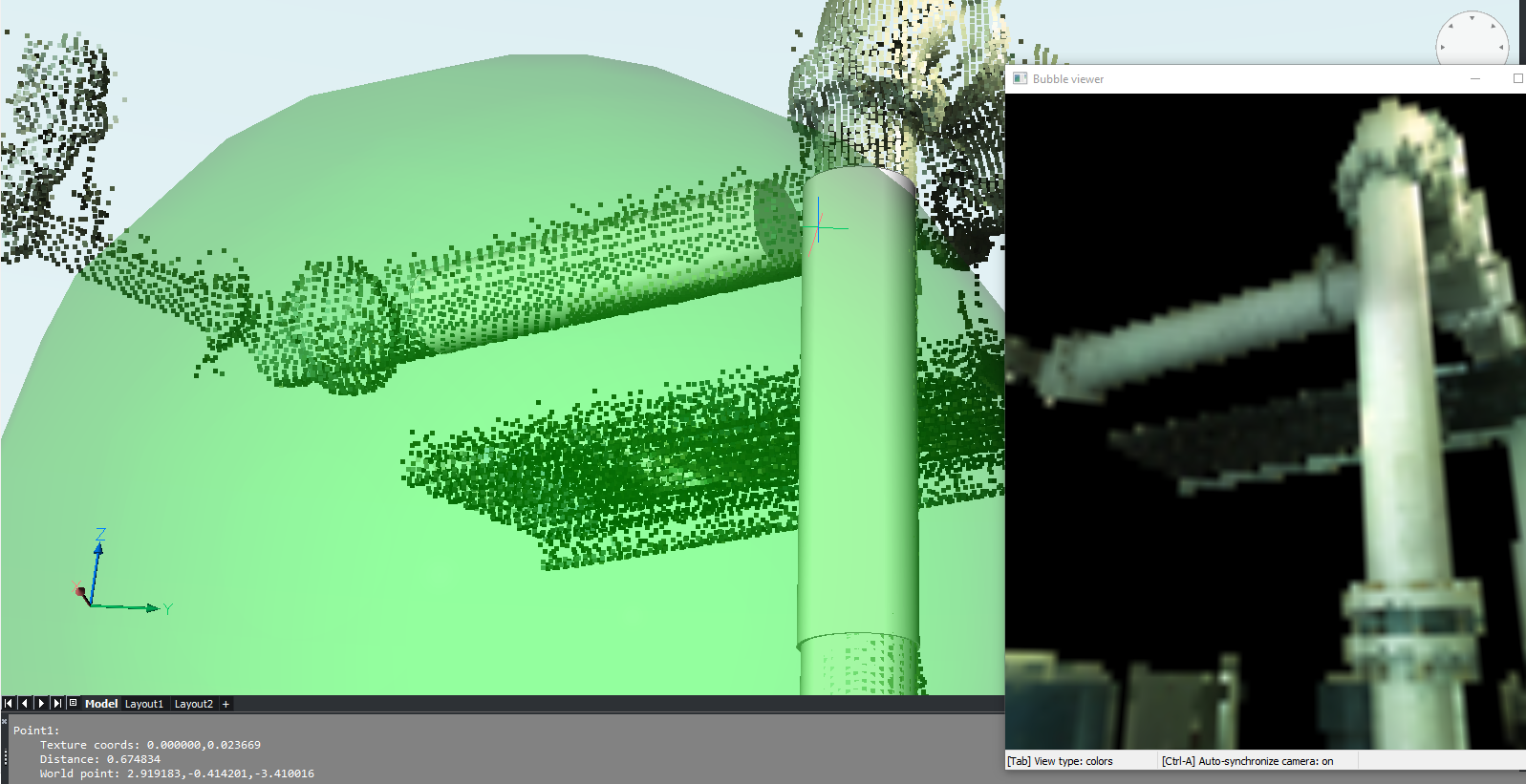
バブルに円柱をフィット
バブルビューア内でPOINTCLOUDFITCYLINDERコマンドを使用すると、点群の円筒部分(パイプなど)に円柱を合わせることができます。円柱を抽出するには、バブルビューアで円柱軸に沿って2回クリックする必要があります(モデルビューではソリッドが作成されます)。
POINTCLOUDDEVIATION
- POINTCLOUDDEVIATIONでは、平面構造と点群の点とのフィット感を視覚的に評価することができます。

- 家の床とフィット平面の点群断面:
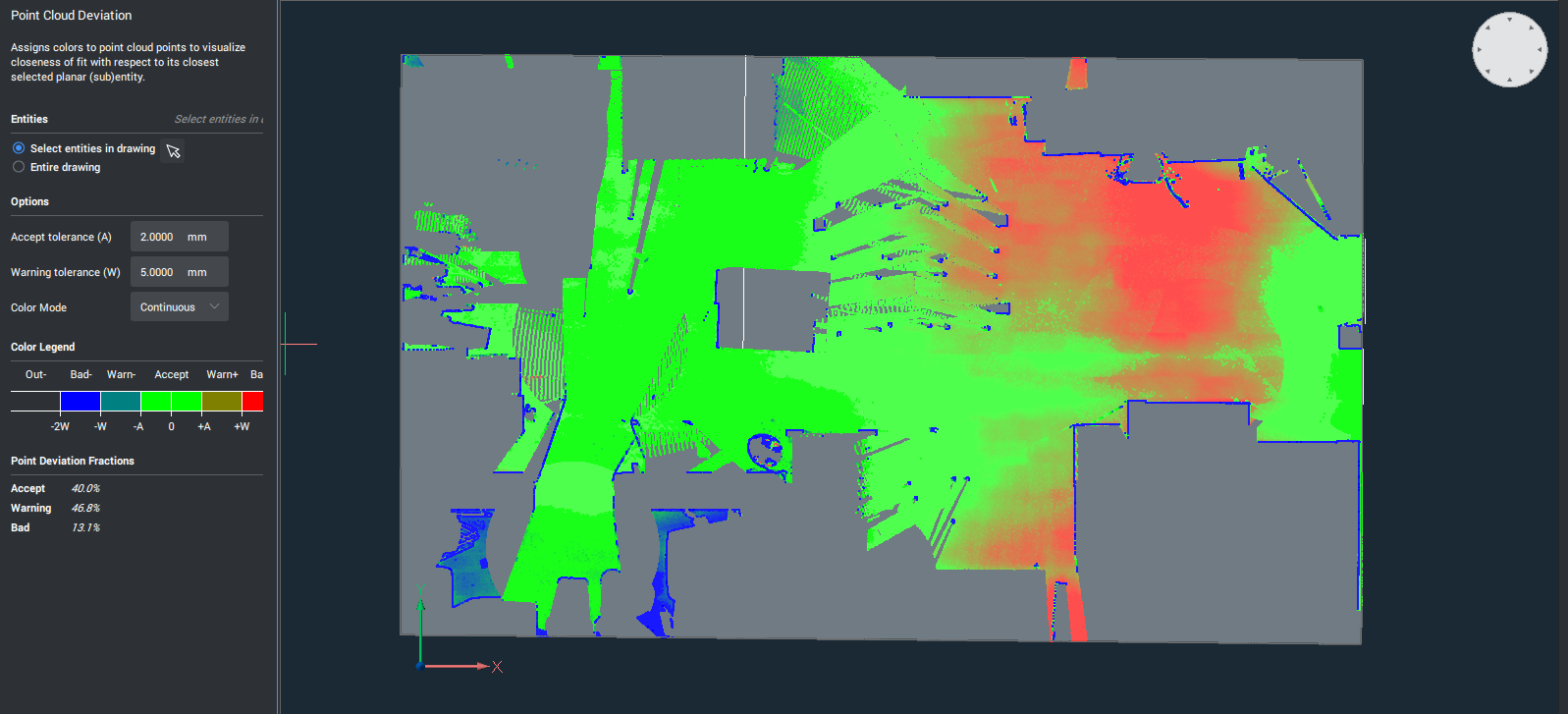
床からフィット平面までの点の距離は、カラーマップを使用して視覚化されます。左のパネルでは、色の説明をしています。(緑は平面、ここで緑から青へのグラデーションはさらに平面より上、緑から赤へのグラデーションはさらに平面より下)また、どのカテゴリのポイントのパーセンテージが表示されるかをまとめています。(OK、警告レベル、など)