POINTCLOUDCLASSIFY comando
Asigna clases a cada punto de una nube de puntos.

Ícono: 
Requisitos
- El clasificador de nube de puntos solo se ejecuta en Windows.
- La GPU de su sistema debe ser compatible con CUDA.Nota: Puedes comprobar si tu GPU es compatible con CUDA aquí.
- Asegúrese de que el controlador NVIDIA más reciente esté instalado y en ejecución.
Si se cumplen todos los requisitos anteriores, el comando POINTCLOUDCLASSIFY ejecutará el clasificador.
Preparación de las bibliotecas clasificadoras
- Descargue las bibliotecas clasificadoras desde aquí.
- Descomprima el archivo.
- Copie el contenido de la carpeta en la BricsCAD carpeta de instalación:
- Seleccione todos los archivos DLL y la carpeta UserDataCache dentro de las bibliotecas clasificadoras y, a continuación, arrástrelos y suéltelos sobre la carpeta de instalación. Se copiarán todos los archivos DLL y se actualizará la carpeta UserDataCache , con la carpeta de modelos PCC copiada dentro de ella.
- Como alternativa, primero puede copiar y pegar todos los archivos DLL dentro de las bibliotecas clasificadoras en la carpeta de instalación y, a continuación, copiar y pegar la carpeta de modelos PCC en la carpeta UserDataCache dentro de la carpeta de instalación.
La ruta predeterminada de la BricsCAD carpeta de instalación es: C:\Archivos de programa\Bricsys\BricsCAD V24 en_US.
Importante: Debe volver a ejecutarse BricsCAD después de copiar las bibliotecas clasificadoras.
Si se cumplen todos los requisitos anteriores y las bibliotecas se copian correctamente, el comando POINTCLOUDCLASSIFY ejecutará el clasificador.
Método
Cuando se llama al comando y se selecciona el modelo, el clasificador se ejecutará en segundo plano y los resultados aparecerán en el panel del administrador de nubes de puntos cuando estén listos.
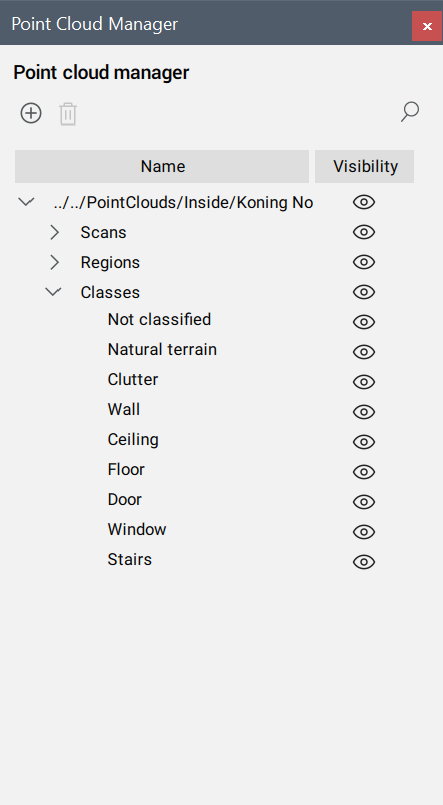
Hay 4 modelos diferentes para usar con el clasificador:
- indoorBasic: 10 clases básicas para escaneos en interiores (paredes, techo, suelo, ventanas, puertas, desorden, etc.).
- indoorSimplified: modelo con 20 clases para escaneos de interiores (clases básicas + Techo inclinado, Equipo de techo, Estructura de acero, Barandilla, etc.).
- indoorFull: modelo con 40 clases para escaneos de interiores (clases simplificadas + Instalación de tuberías, Instalación de cables, Radiador, Fontanería, etc.).
- Exterior: modelo con 5 clases para escaneos al aire libre (Terreno, Vegetación, Edificio, Carretera pavimentada - hardscape, Ruido).
Nota: En el caso de los modelos de interior, los resultados serán más precisos si se dispone de información sobre la habitación. Para obtener información de la habitación, siga estos pasos:
- Genere volúmenes de sección que contengan diferentes plantas del edificio mediante el comando POINTCLOUDDETECTFLOORS. Es posible que los límites verticales de las secciones no sean precisos, así que ajústelos si es necesario. Los volúmenes de sección deben contener el piso y el techo de histórico del edificio.
- Seleccione una de las secciones generadas y ejecute el comando POINTCLOUDDETECTROOMS para detectar diferentes habitaciones en la planta seleccionada. Los resultados aparecerán en Edificio en el panel Administrador de nubes de puntos .
Opciones dentro del comando
- interiorBasico
- Clasifica nubes de puntos utilizando clases básicas de interiores.
- interiorCompleto
- Clasifica nubes de puntos utilizando clases completas de interiores.
- interiorSimplificado
- Clasifica nubes de puntos mediante clases simplificadas de interiores.
- La clasificación será más precisa si la información de la habitación está disponible. ¿Quierescontinuar sin información de la habitación?
- Permite decidir si la clasificación continúa sin información de la habitación.
- Exterior
- Clasifica las nubes de puntos mediante clases al aire libre.