Praca z chmurami punktów
Wstępne przetwarzanie, zarządzanie i dołączanie chmur punktów
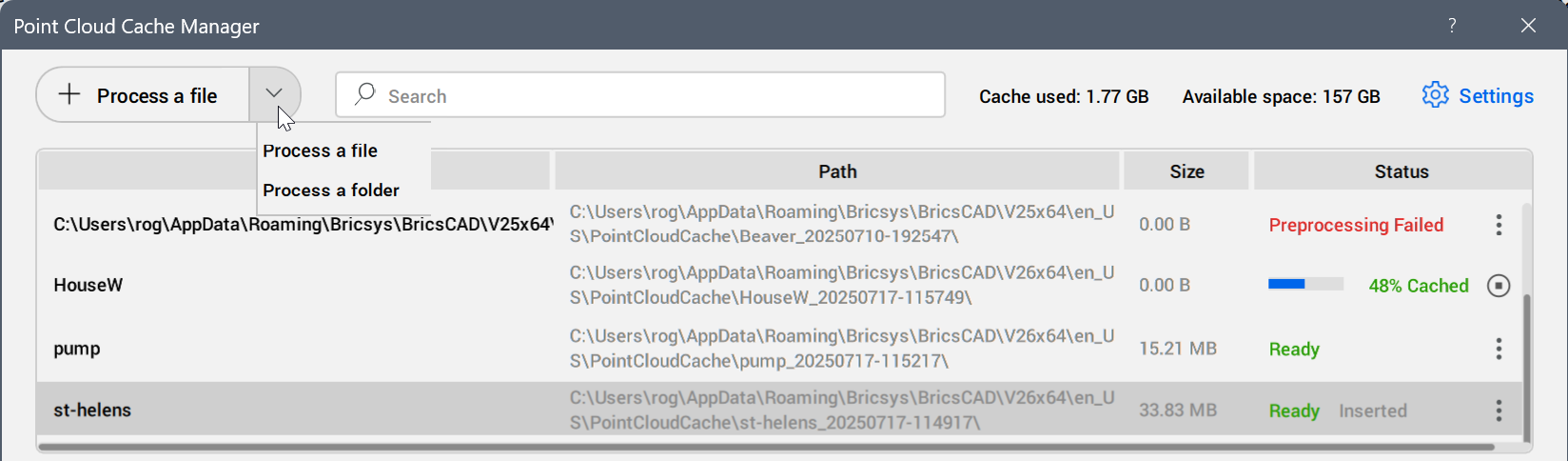
Aby wstępnie przetworzyć chmurę punktów, użyj polecenia CHMURAPUNKTÓWODNIESIENIE w celu otwarcia okna dialogowego Menadżer Odniesień Chmury Punktów, a następnie wybierz opcję Przetwórz plik lub Wstępnie przetwórz nowy skan. Można również użyć polecenia WSTAWCHMURĘPUNKTÓW.
Wstępne przetwarzanie chmury punktów można rozpocząć od zapisanego lub niezapisanego pliku DWG. Zostaniesz poproszony o podanie chmury punktów wejściowych (bez jednostek lub punktu wstawienia).
Wszystkie dane są odczytywane, przetwarzane i zapisywane na dysku oraz tworzony jest plik LOG. Postęp jest śledzony i wyświetlany w oknie dialogowym Menadżer Odniesień Chmury Punktów.
Wstępne przetwarzanie chmur punktów składa się z dwóch etapów. Pierwszym krokiem jest przetwarzanie punktów, a drugim optymalizacja wizualna.
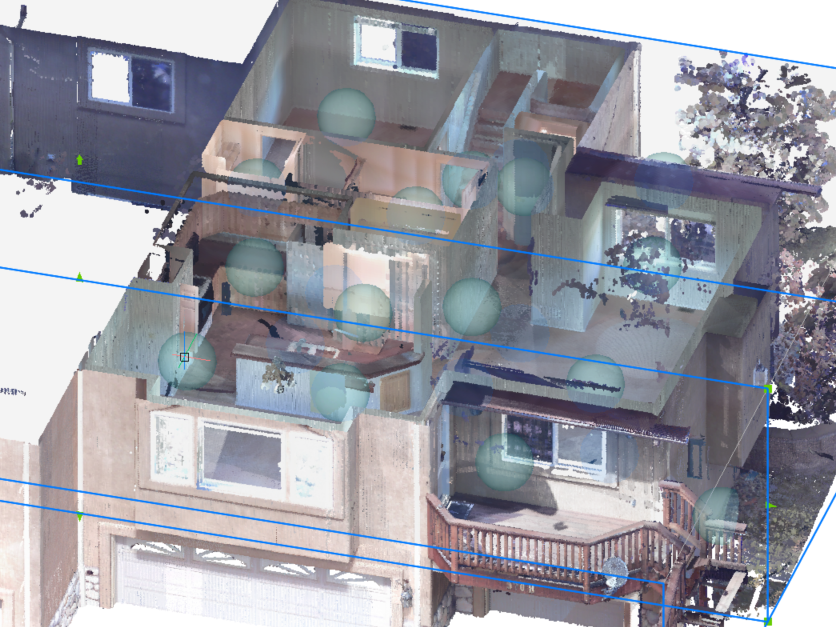
Pliki chmury punktów i obrazy 360 są udostępniane niemal natychmiast na rysunku, a bąbelki są wyświetlane w kolorze fioletowym. Bąbelki te nie zawierają informacji takich jak normalna i głębokość w punktach. Wstępne przetwarzanie bąbelków trwa w tle, dopóki wszystkie informacje nie będą gotowe. Bąbelki są następnie wyświetlane na zielono.
Postęp przetwarzania wstępnego jest rejestrowany w pliku dziennika w podfolderze związanym z chmurą punktów. Ten podfolder znajduje się wewnątrz bieżącej ścieżki pamięci podręcznej chmury punktów (można ją ustawić w zmiennej systemowej POINTCLOUDCACHEFOLDER). Domyślna ścieżka do bieżącej pamięci podręcznej chmury punktów to C:\Users\%username%\AppData\Roaming\Bricsys\BricsCAD\V26x64\en_US\PointCloudCache\Folder_for_processed_pointcloud.
- Wyszukaj plik lub przefiltruj listę zbuforowanych chmur punktów za pomocą paska wyszukiwania u góry.
- W sekcji Detale wyświetlane są wszystkie metadane dostępne dla wybranej chmury punktów.
- Można edytować nazwę danych, jednostkę i układ współrzędnych GIS.
- Każdy podfolder zawierający wcześniej przetworzone dane pamięci podręcznej chmury punktów (z innego folderu) BricsCAD folder pamięci podręcznej chmury punktów lub wstępnie przetworzony za pomocą pliku wykonywalnego powłoki preprocessor.exe) można skopiować do folderu określonego przez zmienną systemową POINTCLOUDCACHEFOLDER (wartość domyślna: C:\Użytkownicy\%nazwa_użytkownika%\AppData\Roaming\Bricsys\BricsCAD\V26x64\en_US\PointCloudCache). Pliki pamięci podręcznej będą dostępne po następnym otwarciu Menedżer pamięci podręcznej chmury punktów okno dialogowe. Dla każdego podfolderu w folderze pamięci podręcznej chmury punktów dostępny jest element w oknie dialogowym Menedżer pamięci podręcznej chmury punktów.
- Jeśli pamięć podręczna chmury punktów pliku przetworzonego w formacie HSPC nie zostanie znaleziona w określonej lokalizacji, powiadomienie w zasobniku przekieruje użytkownika do panelu Załączniki. W tym miejscu można wybrać nową ścieżkę dla folderu pamięci podręcznej.
Aby rozpocząć dołączanie zbuforowanej chmury punktów, użyj przycisku Dołącz. Zostanie otwarte okno dialogowe Dołącz chmurę punktów. W tym miejscu można ustawić punkt wstawienia, skalę, obrót, jednostkę i układ współrzędnych GIS instancji chmury punktów. Możesz także zdecydować się na użycie danych geograficznych (jeśli są dostępne).
Wyrównanie
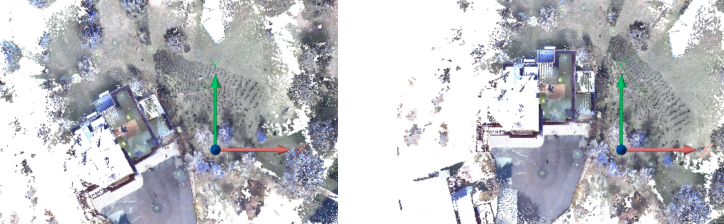
Polecenie CHMURAPUNKTÓWWYRÓWNAJ automatycznie obraca chmurę punktów, aby optymalnie wyrównać ją względem osi X i Y, biorąc pod uwagę pionowe powierzchnie płaskie w chmurze punktów (np. ściany). Aby określić najlepsze wyrównanie, użytkownik jest proszony o określenie najbardziej odpowiedniego obszaru chmury punktów zawierającego ściany.
Przeglądarka bąbelków
W zależności od oryginalnego formatu pliku chmury punktów i typu skanera używanego podczas skanowania (statycznego lub kinematycznego), we wszystkich lokalizacjach skanowania mogą być wyświetlane bąbelki (zielone kule) lub punkty trasy (niebieskie kule). W tych lokalizacjach można doświadczyć najbardziej realistycznych wizualnych reprezentacji, otwierając Przeglądarkę Bąbelków.
Otwiera Przeglądarkę bąbelków.
- Uruchom polecenie CHMURAPUNKTÓWPRZEGLĄDARKABĄBELKÓW.
- Wybierz opcję Otwórz skan w przeglądarce bąbelków z menu kontekstowego skanu lub punktu trasy na liście Skany lub Punkty trasy w panelu Menedżer chmury punktów.
Dane strukturalne są przechwytywane za pomocą skanera statycznego. W tym przypadku lokalizacja skanera jest znana dla każdego punktu. Zielone bąbelki są tworzone w miejscach skanera statycznego na podstawie zeskanowanych punktów.
Niestrukturalne dane są przechwytywane za pomocą skanera kinematycznego. W tym przypadku nie ma dokładnej lokalizacji, z której punkty zostały zeskanowane. Niektóre skanery kinematyczne tworzą panoramiczne obrazy w odstępach czasowych. Dla tych obrazów znana jest lokalizacja i tworzone są punkty trasy (niebieskie kule).
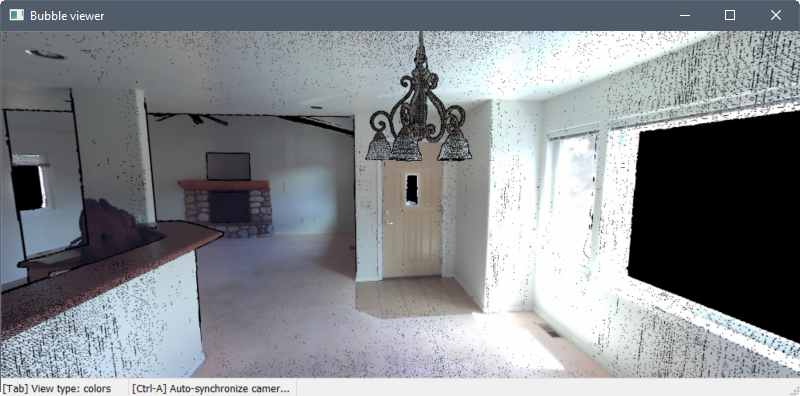
Wskaż indeks bąbelków w poleceniu POINTCLOUDBUBBLEVIEWER lub kliknij dwukrotnie jeden z bąbelków w obszarze modelu, aby otworzyć Przeglądarkę bąbelków.
Naciśnij i przytrzymaj środkowy przycisk myszy, a następnie przesuń mysz, aby wyświetlić chmurę punktów w dowolnym kierunku z tego miejsca skanowania.
Powiększaj i pomniejszaj za pomocą kółka myszy.

Pobliskie skany są oznaczone w przeglądarce bąbelkowej czerwonymi bąbelkami. Najechanie kursorem na dymek spowoduje wyświetlenie nazwy skanowania. Kliknij dwukrotnie dymek, aby otworzyć skan w przeglądarce.

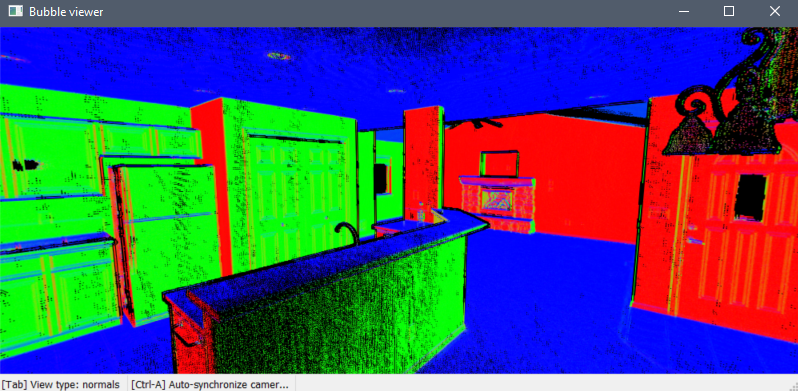
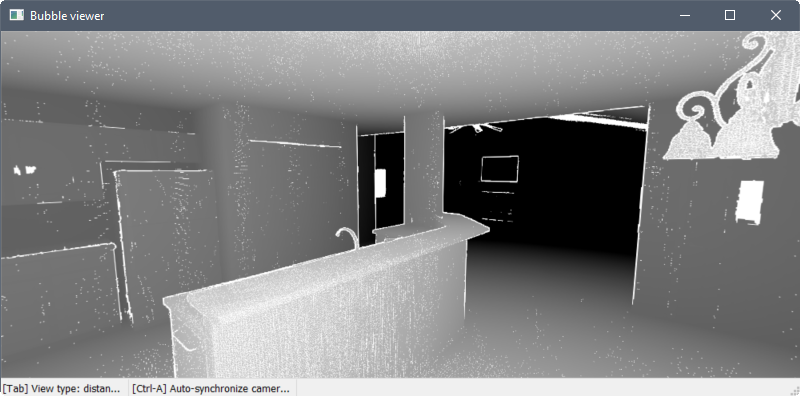
Naciśnij klawisz Tab, aby przełączać się między trzema różnymi trybami wizualnymi (typami widoku).
-
W trybach kolorów i kolorów (głębi) punkty są wyświetlane jako ich rzeczywiste kolory lub w skali szarości, w zależności od sposobu skanowania danych.
-
W trybie normalnym punkty są wyświetlane na czerwono, zielono lub niebiesko zgodnie z ich wektorami normalnymi. Kolory odpowiadają osiom LUW.
-
W trybie odległości punkty są wyświetlane od jasnych do ciemnych wraz ze wzrostem odległości od miejsca skanowania.
Zsynchronizuj widok rysunku z Przeglądarką Bubble, naciskając Ctrl+A.

Punkty charakterystyczne
Funkcja Najbliższy punkt chmury punktów Punkty charakterystyczne(polecenie PCNAJBLIŻSZY / zmienna systemowa 3DOSMODE) znacznie poprawia możliwość wyboru odpowiednich punktów chmury punktów. Używa wyimaginowanego cylindra od bieżącego punktu widzenia w kierunku kursora.
Promień wyimaginowanego cylindra jest definiowany przez ustawienie Pole wyszukiwania punktów (zmienna systemowa APBOX).
Włącz przyciąganie obiektów Najbliższy punkt chmury punktów (kod bitowy 124 zmiennej systemowej 3DOSMODE) wraz z innymi przyciąganiami obiektów 3D w menu przyciągania obiektów, pasku narzędzi i ustawieniach.
Eksport
Polecenie CHMURAPUNKTÓWEKSPORT chmurę punktów umożliwia wyeksportowanie widocznych części chmury punktów do pliku PTS, HSPC lub LAZ.
Wykrywanie podłogi
Polecenie CHMURAPUNKTÓWWYKRYJPIĘTRA wykrywa piętra w chmurze punktów budynku. Wykrywanie opiera się na regionach punktów o podobnych współrzędnych Z. Wykryte piętra mogą pomóc w nawigacji po chmurach punktów budynków.
- Aby usprawnić proces wykrywania pięter, należy ukryć punkty, które nie są związane z budynkiem (otoczenie, inne budynki itp.). Można użyć poleceń chmury punktów, takich jak CHMURAPUNKTÓWPRZYCIĘCIE, CHMURAPUNKTÓWREGION, CHMURAPUNKTÓWKLASYFIKUJ. Wyłącz widoczność nieistotnych klas w panelu Menedżer Chmury Punktów.
- Polecenie CHMURAPUNKTÓWWYKRYJPIĘTRA jest używane jako krok w przepływie pracy skanowania chmury punktów do przepływu pracy BIM. Zobacz artykuł Przepływ Skanowanie chmury punktów do BIM.
Rzutowanie chmury punktów
Polecenie CHMURAPUNKTÓWRZUTPRZEKROJU umożliwia wykrywanie ścian z przekróju objętościowego chmury punktów w oparciu o różne opcje wykrywania ścian. Przekrój objętościowy można tworzyć za pomocą polecenia BIMPRZEKRÓJ. Przekrojów tych można użyć do wygenerowania linii 2D w celu utworzenia planu piętra 2D lub przekroju pionowego. Jest to proces działający w tle i wiele przekrojów może być przetwarzanych w kolejce. W ten sposób możliwe jest uruchomienie tego polecenia w pełnej rozdzielczości na wszystkich przekrojach.
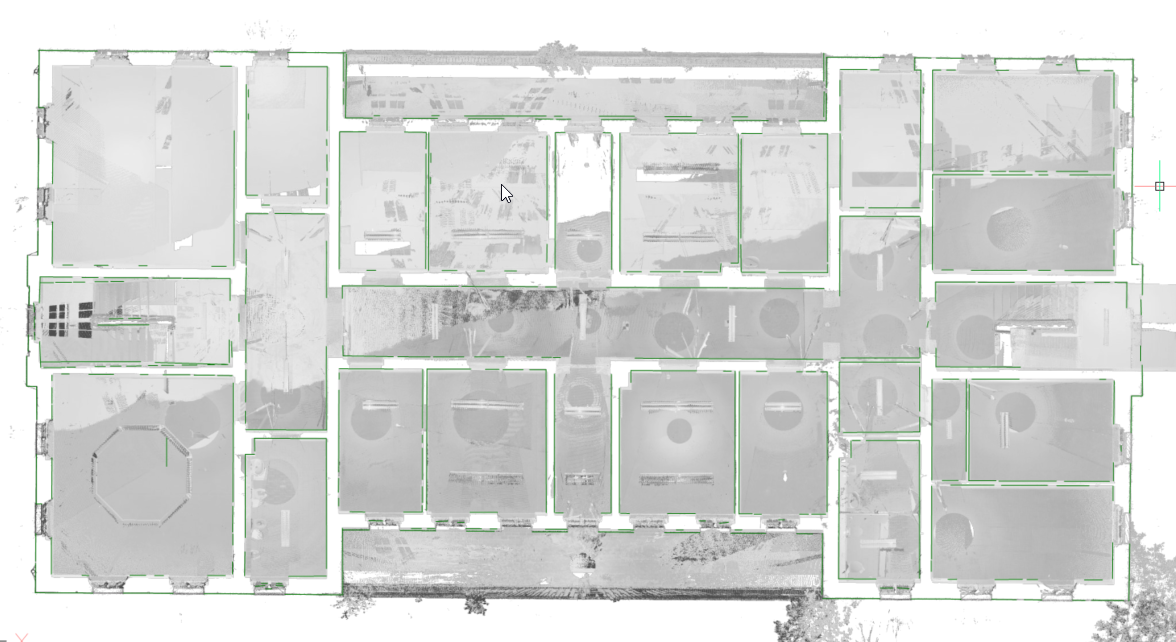
W tym samym czasie generowany jest obraz rastrowy, aby dać użytkownikowi pewien kontekst. W niektórych przypadkach nie ma konieczności odtwarzania istniejącego budynku. Obrazy tła mogą nadać dokumentom projektowym o wiele więcej kontekstu. Można ich użyć do weryfikacji utworzonej geometrii 2D, ale w skanach o wysokiej jakości obrazy te mogą być również użyte jako materiał graficzny. Na przykład jako obraz tła dla modelu BIM w projektach renowacji, w których dokonuje się nowoczesnych interwencji w zabytkowych budynkach.
Dopasowanie planarne
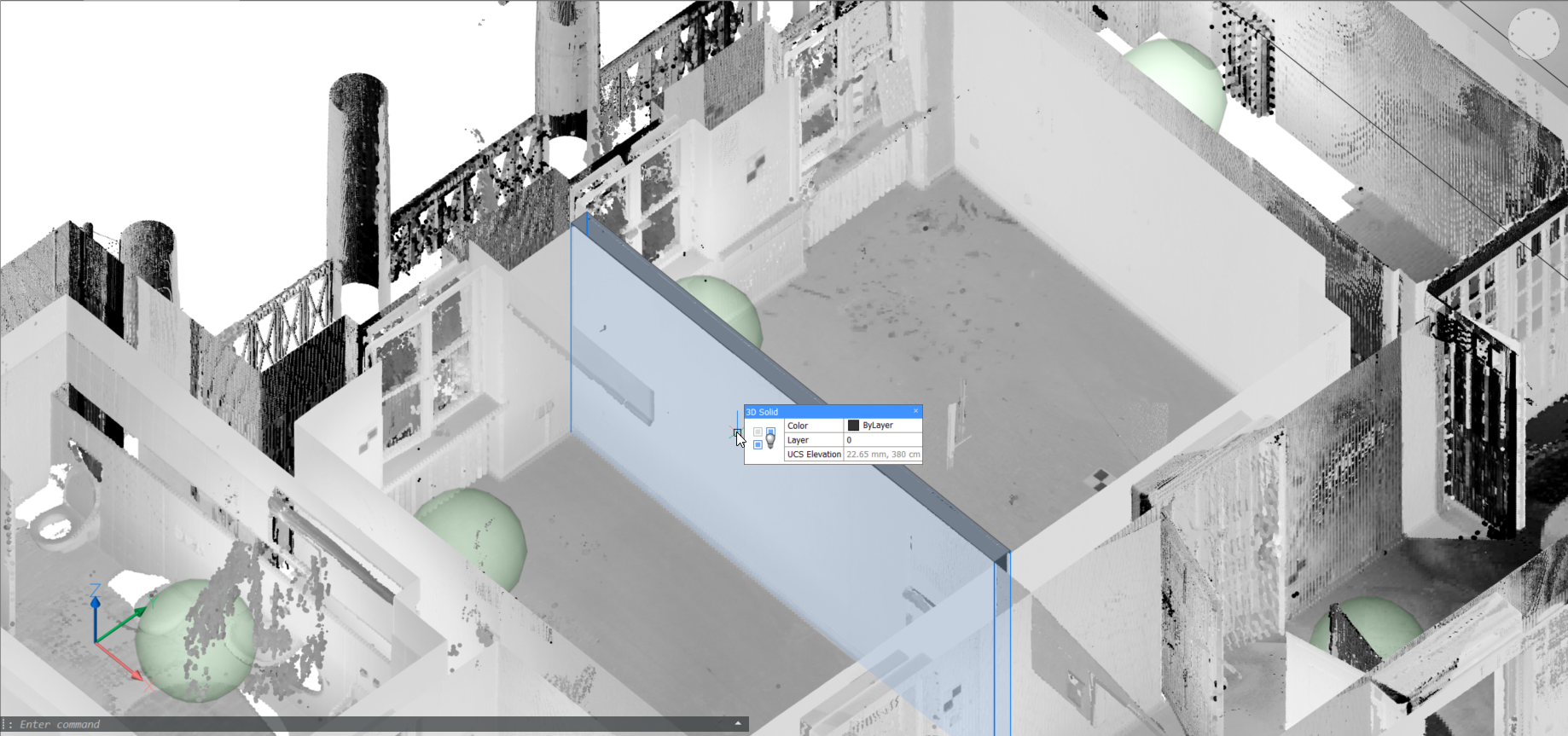
Polecenie CHMURAPUNKTÓWDOPASUJPLANARNIE umożliwia tworzenie geometrii 3D na podstawie chmury punktów. Tworzy płaską powierzchnię lub bryłę po wybraniu punktu początkowego w chmurze punktów. Aby wykryć punkty, które leżą na tej samej płaszczyźnie co punkt początkowy, używana jest wartość progowa, którą można ustawić jako właściwość jednostki chmury punktów. Przytrzymując klawisz Shift i wybierając sąsiednie ściany pomieszczenia, dopasowane płaszczyzny są przedłużane/przycinane w celu utworzenia zamkniętej powierzchni.
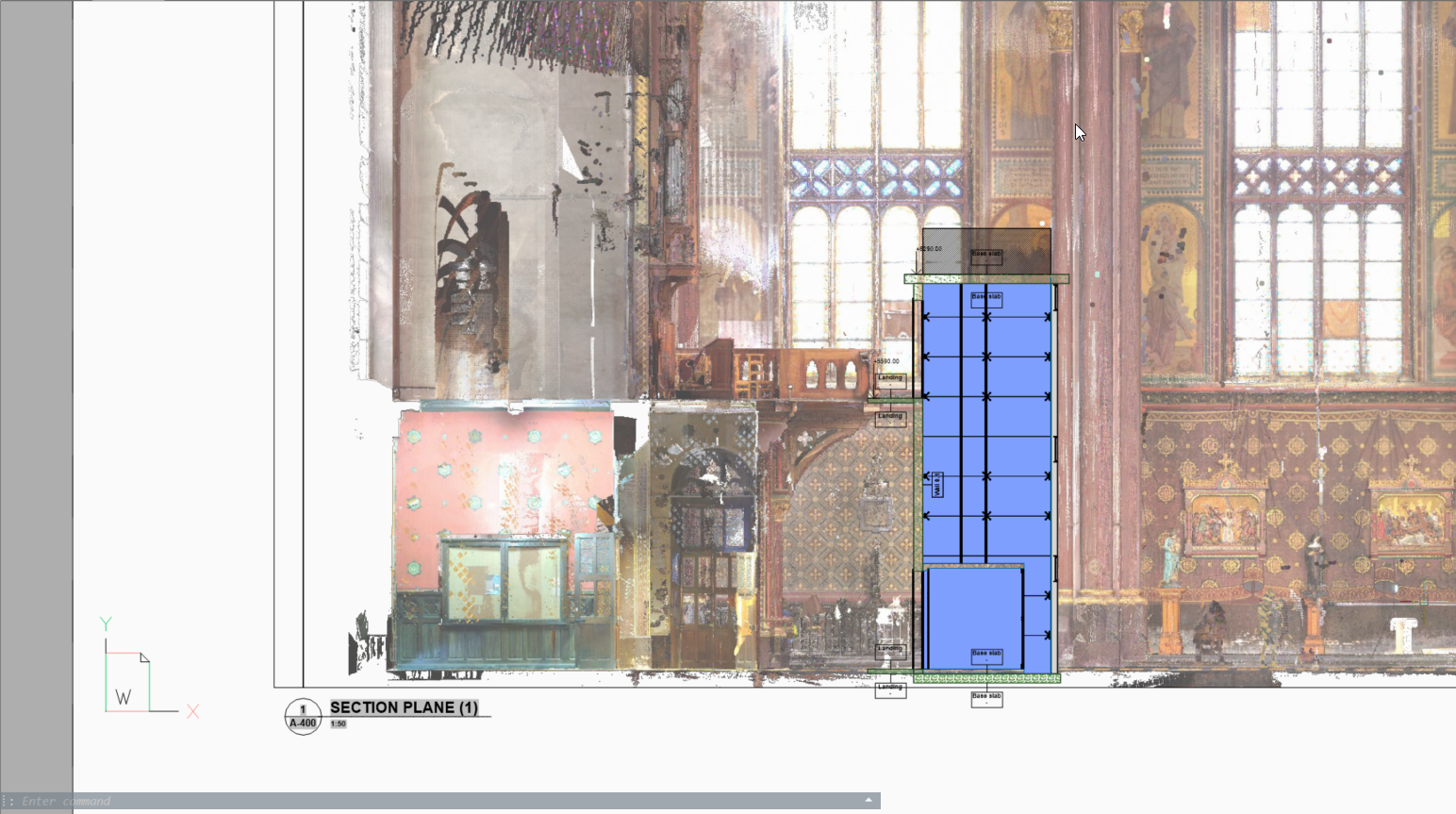
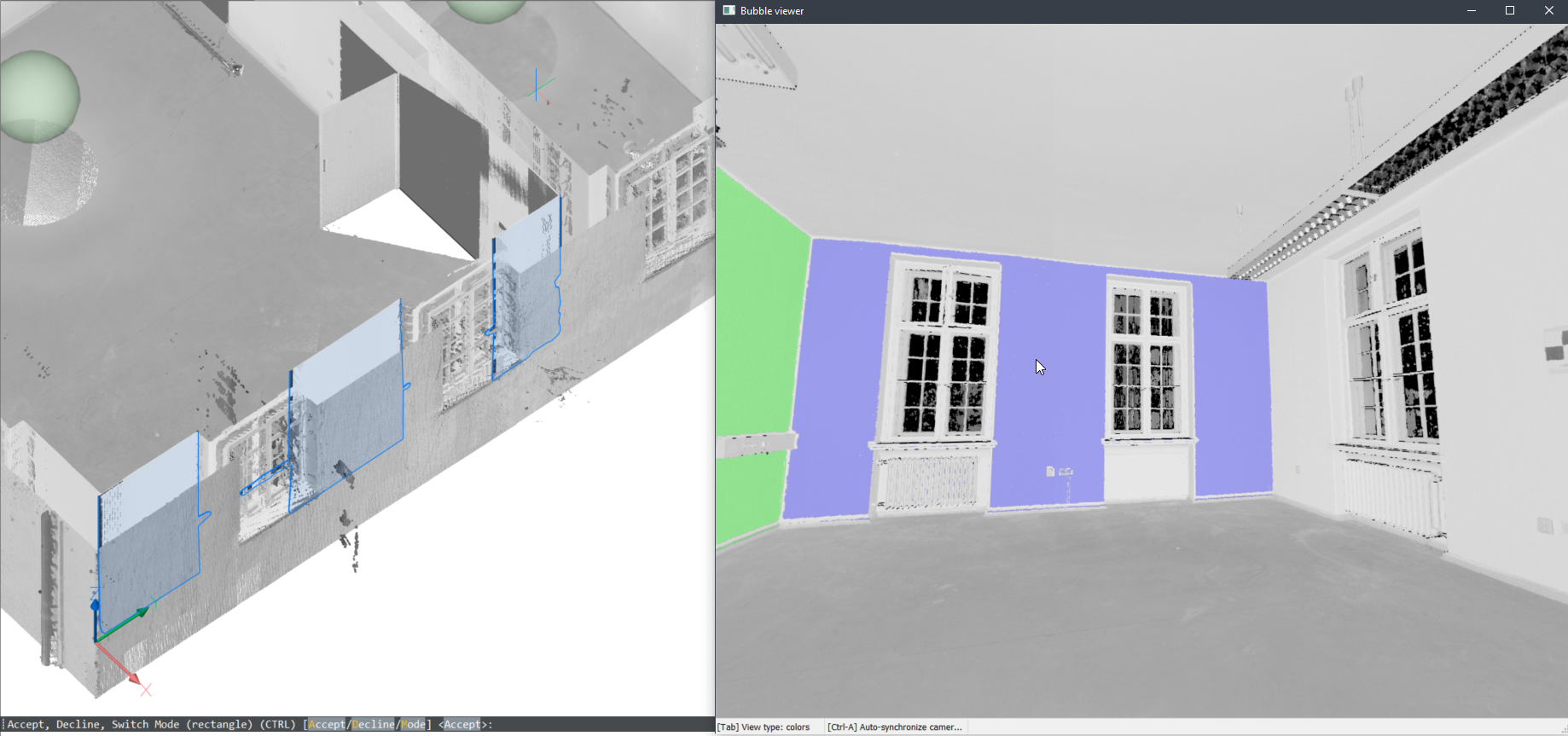
- Wybierz otwory pozwala uwzględnić otwory drzwi i okien (tylko w Przeglądarce Bubble Viewer).
- Opcja Dopasuj obramowania umożliwia dopasowanie płaskiego konturu obramowania.
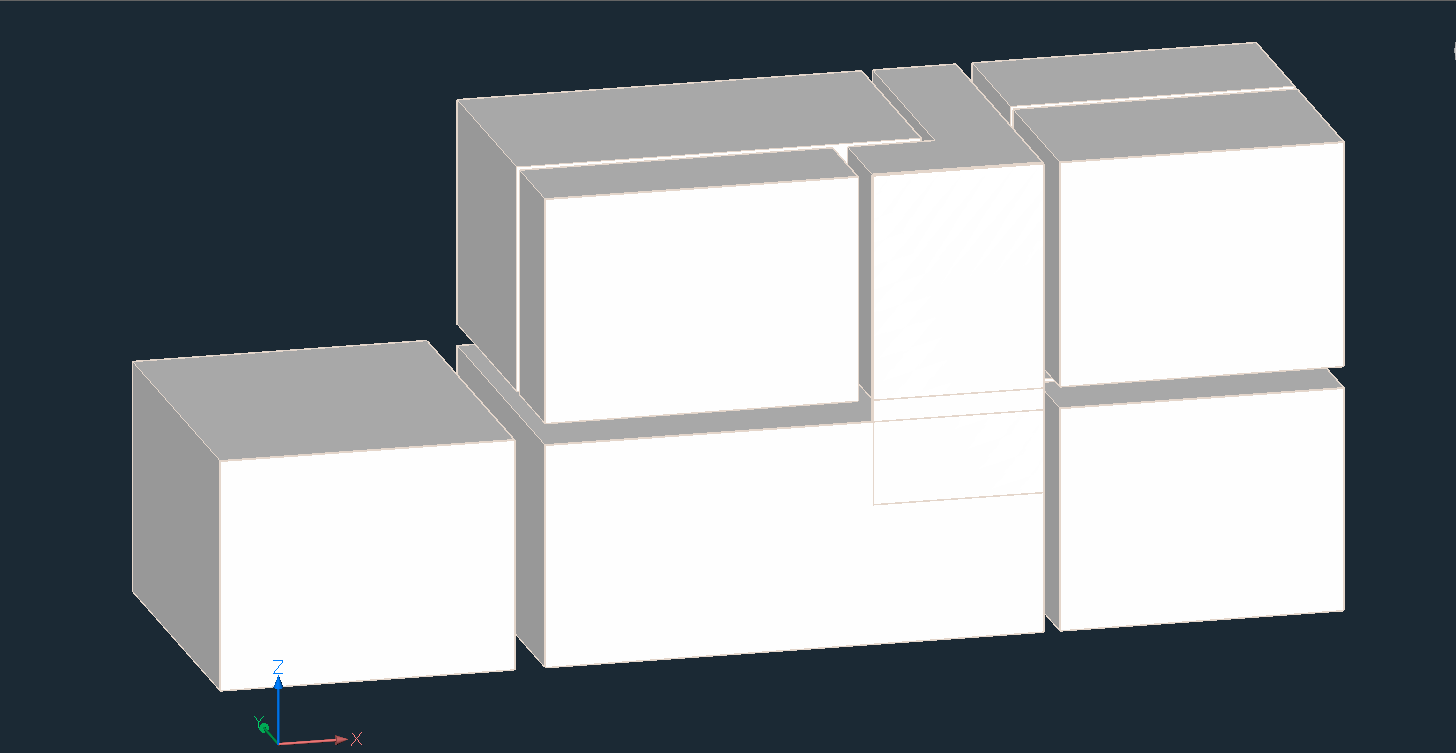
- Zszyj powierzchnie umożliwia zszycie wyniku wielu dopasowanych płaszczyzn w, na przykład, bryłę, która może być później użyta z poleceniem BIMODWRÓĆPRZESTRZENIE.
- W widoku bąbelkowym
-
Jeśli Przeglądarka bąbelków jest otwarta w momencie uruchomienia polecenia, strona BricsCAD oczekuje wybrania punktów początkowych płaszczyzny wewnątrz Przeglądarki bąbelków. Kursor wyświetla podgląd normalnego kierunku płaszczyzny. Następnie wyświetlany jest podgląd zarówno w Przeglądarce bąbelków, jak i w widoku modelu. Możesz przełączać się między dwoma reprezentacjami kształtów za pomocą klawisza Ctrl.
Uwaga: Będąc nadal w trybie wyboru, odpowiednie punkty w dymku są wyświetlane na fioletowo. Punkty te są wyświetlane na zielono, gdy użytkownik zaakceptuje wygenerowany wynik.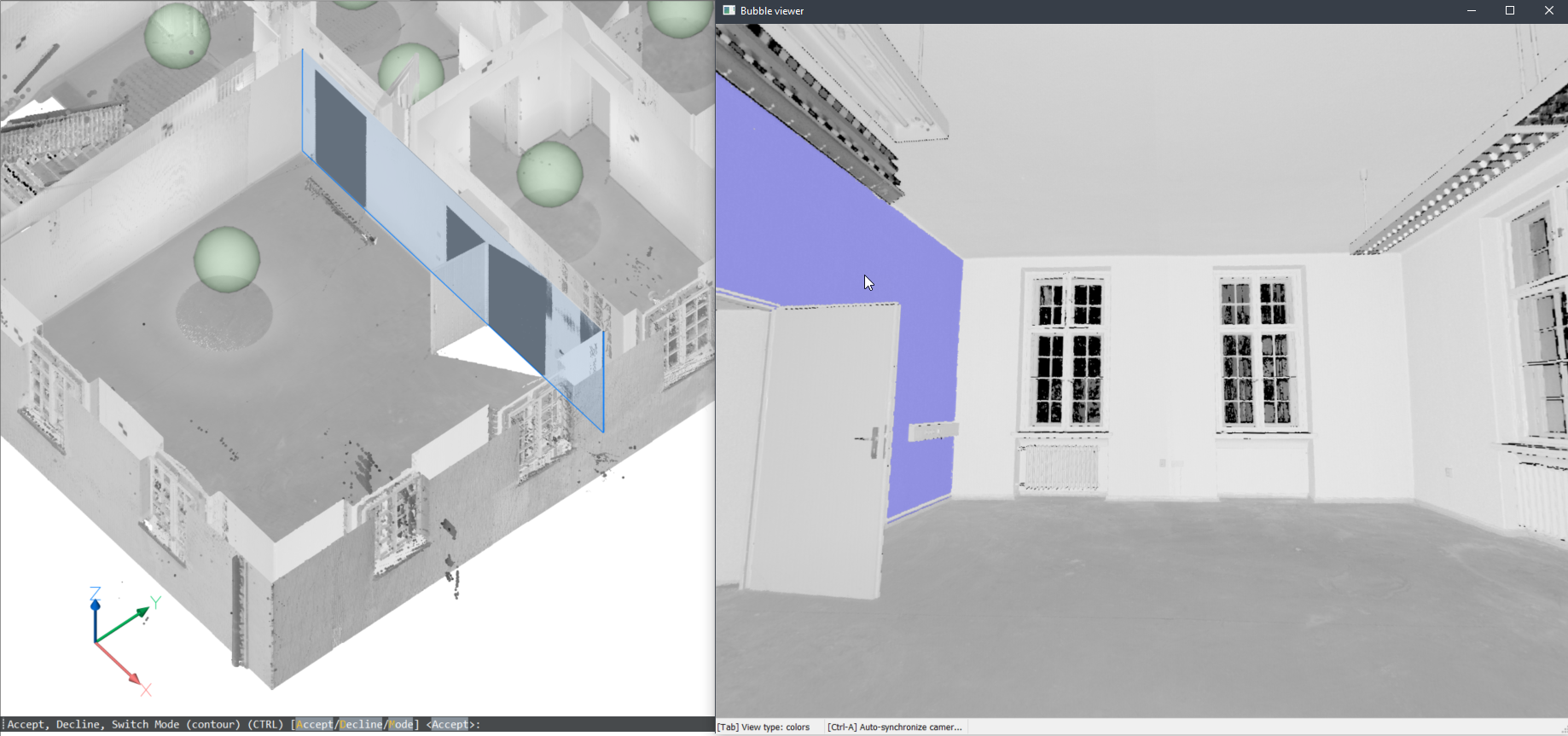
- W obszarze modelu
- Polecenia tego można również użyć w przestrzeni modelu, gdy Przeglądarka bąbelków nie jest otwarta. BricsCAD prosi o wybranie punktu chmury punktów w przestrzeni modelu. W zależności od rozmiaru widocznych części chmury punktów może to zająć więcej czasu w porównaniu z uruchomieniem polecenia w Przeglądarce bąbelków. Ma to jednak dwie zalety, przeszukując wiele pozycji skanowania:
- Może tworzyć większe powierzchnie, łącząc części różnych skanów.
- Może wykrywać grubość ścian i płyt.
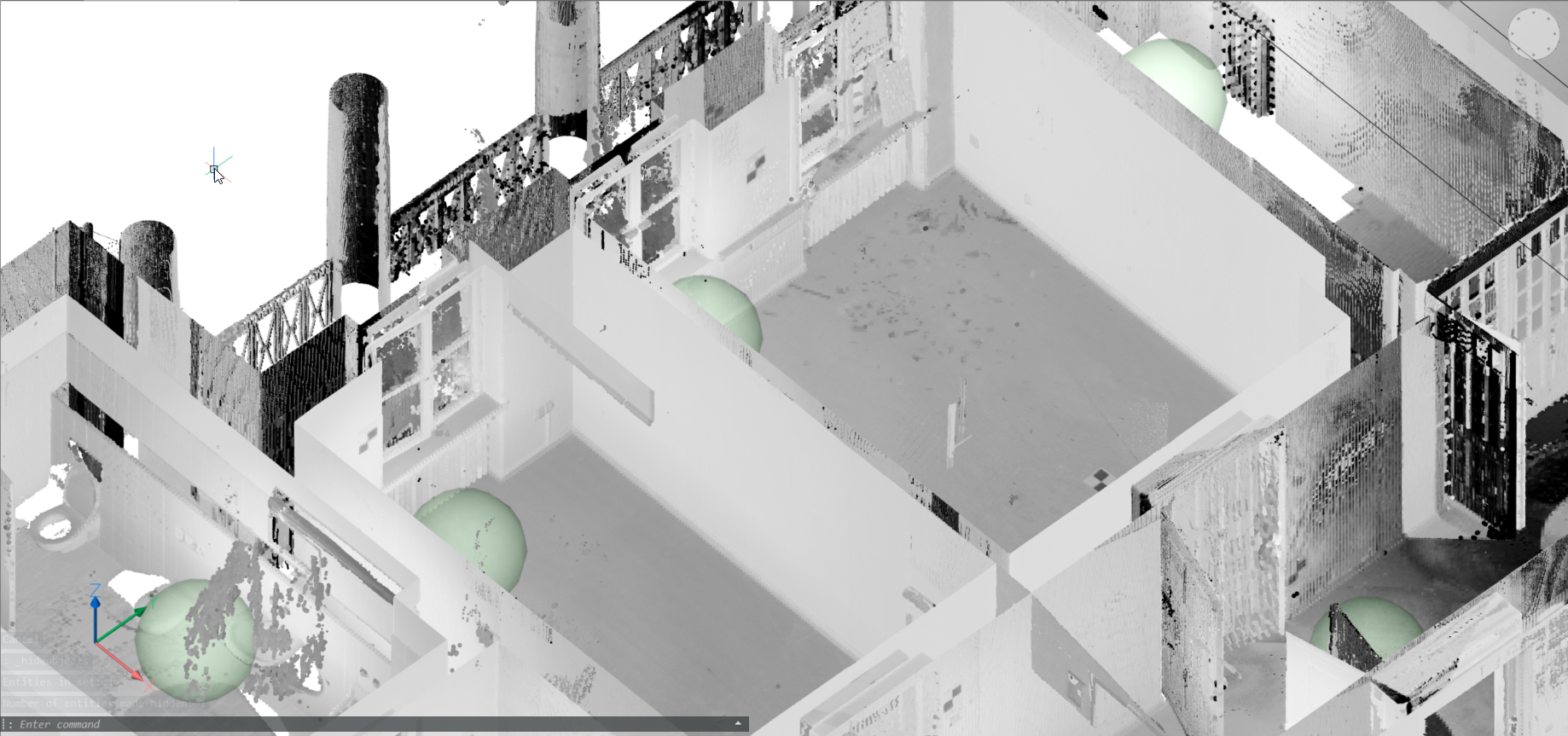
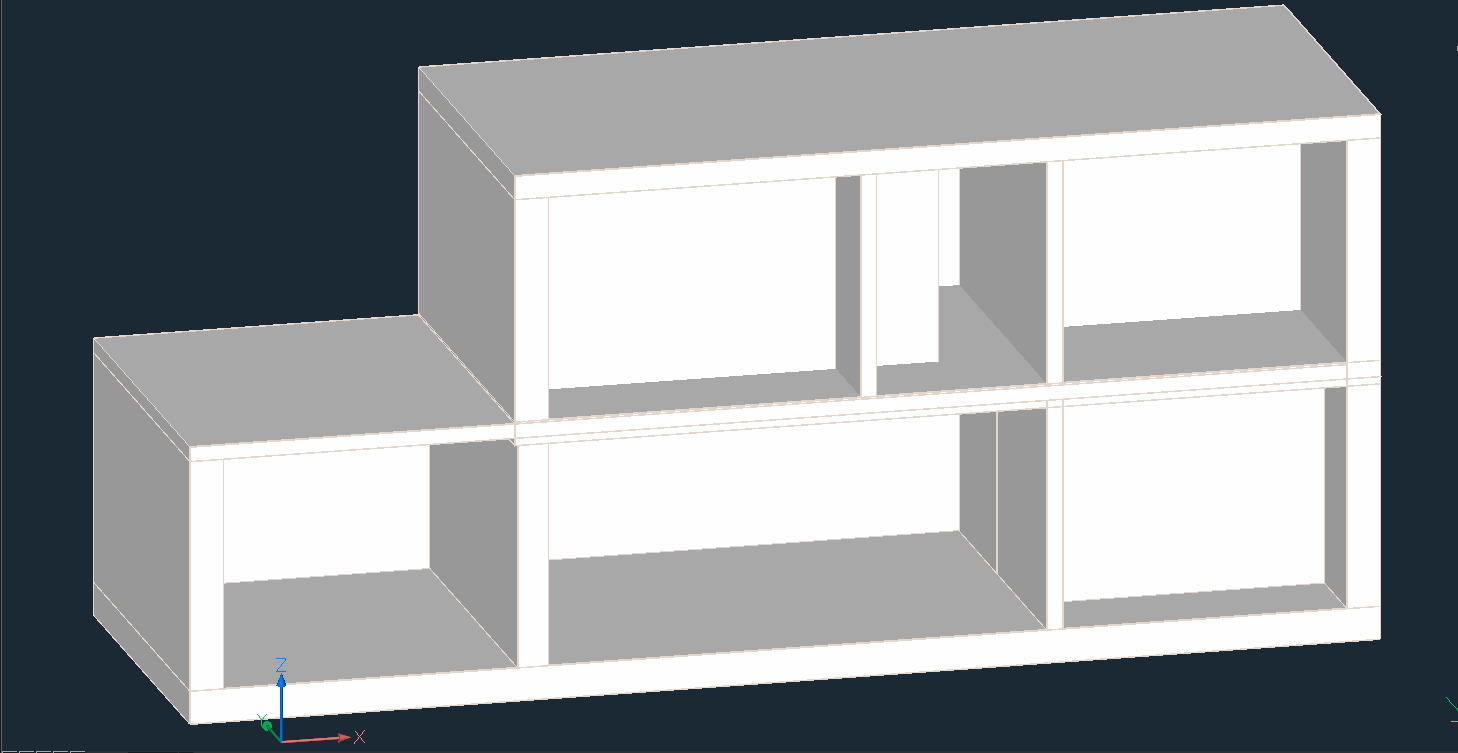
Uwaga: W tym miejscu zapewniony jest przepływ pracy związany z konwersją skanu do modelu budynku. Chmura punktów (górny obraz) jest najpierw przekształcana w zestaw brył, po jednej na pomieszczenie, przy użyciu zszytych wyników CHMURAPUNKTÓWDOPASUJPLANARNIE (środkowy obraz). Polecenie BIMODWRÓĆPRZESTRZENIE przekształca te tymczasowe bryły pomieszczeń w model budynku ze ścianami i płytami z odwrócenia tych brył.
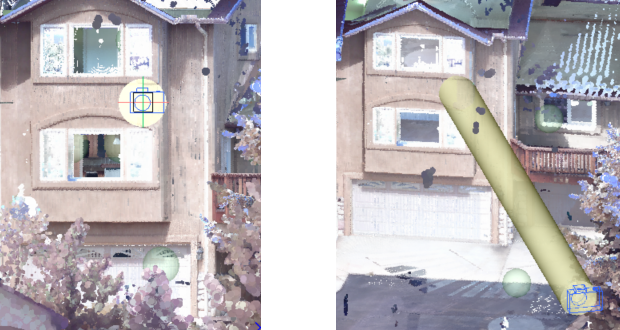
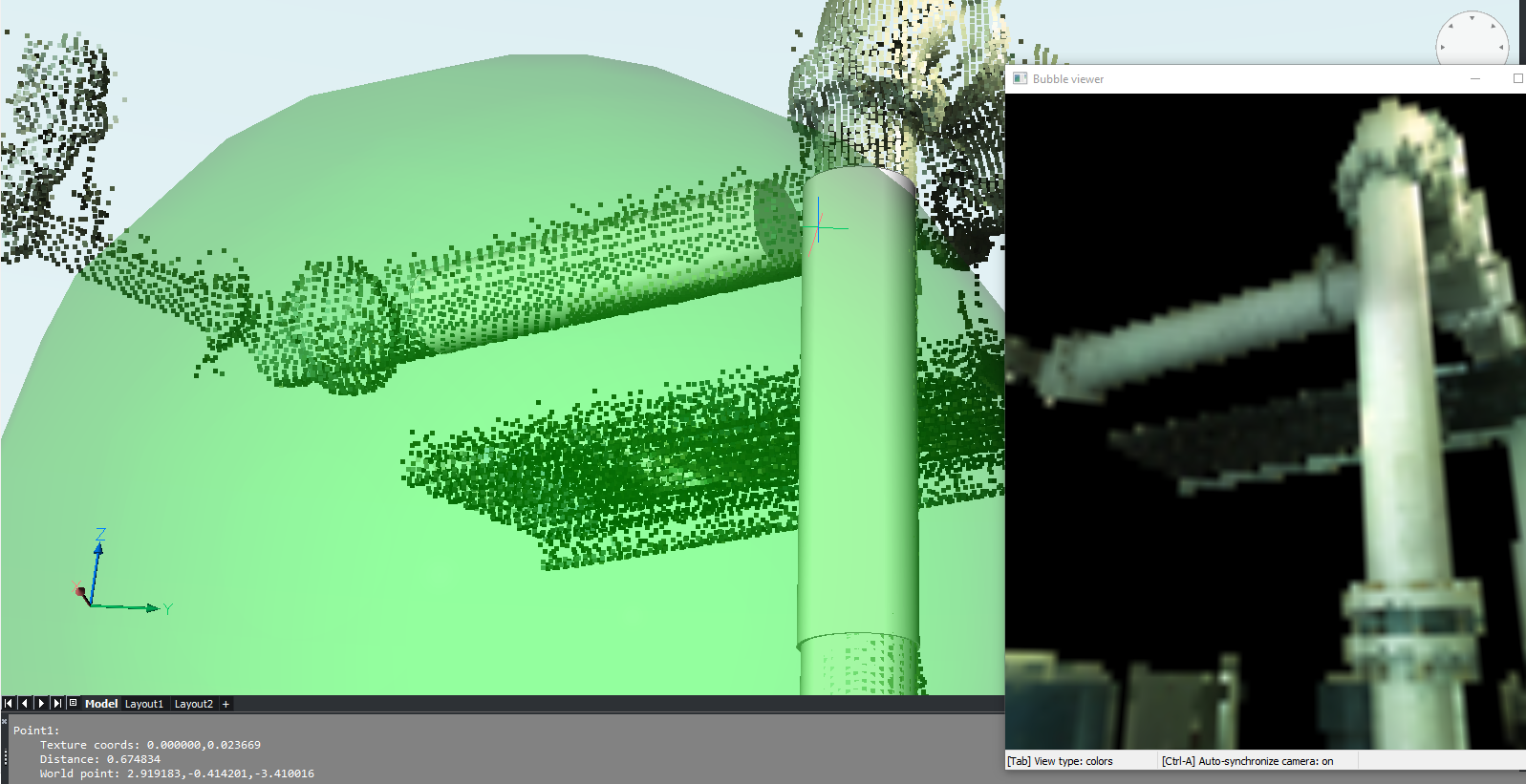
Dopasuj cylinder do bąbelków
Za pomocą polecenia CHMURAPUNKTÓWDOPASUJCYLINDER w Przeglądarce bąbelków można dopasować walec do cylindrycznych części chmury punktów (np. Dwa kliknięcia wzdłuż osi cylindra w Przeglądarce bąbelków er są potrzebne do wyodrębnienia cylindra (bryła jest tworzona w widoku modelu).
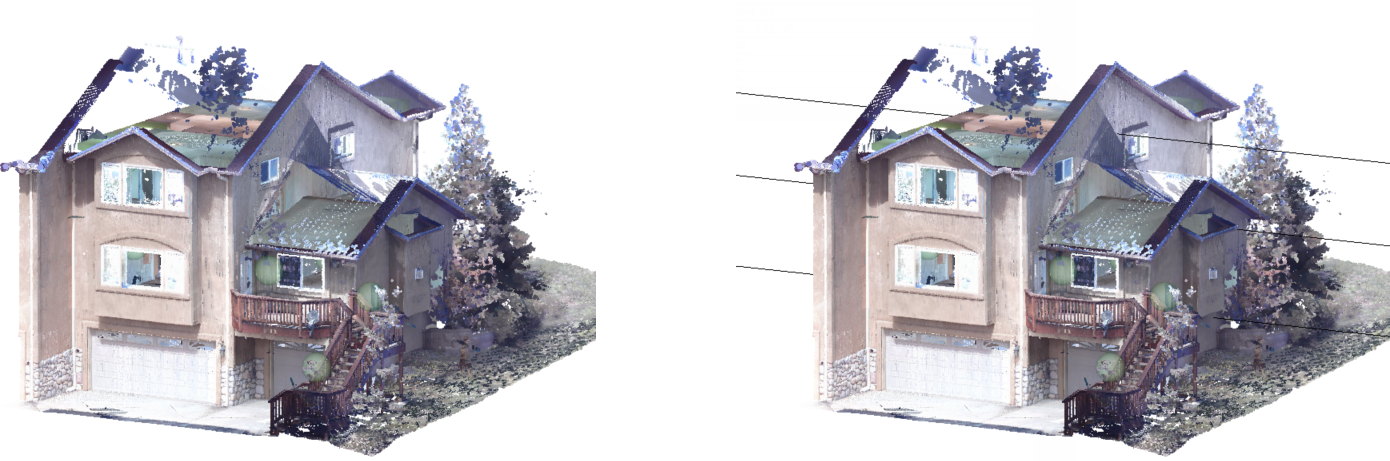
CHMURAPUNKTÓWODCHYLENIE
- CHMURAPUNKTÓWODCHYLENIE umożliwia wizualną ocenę dopasowania między strukturami płaskimi a punktami chmury punktów.

- Przekrój chmury punktów podłogi domu i płaszczyzny dopasowanej:
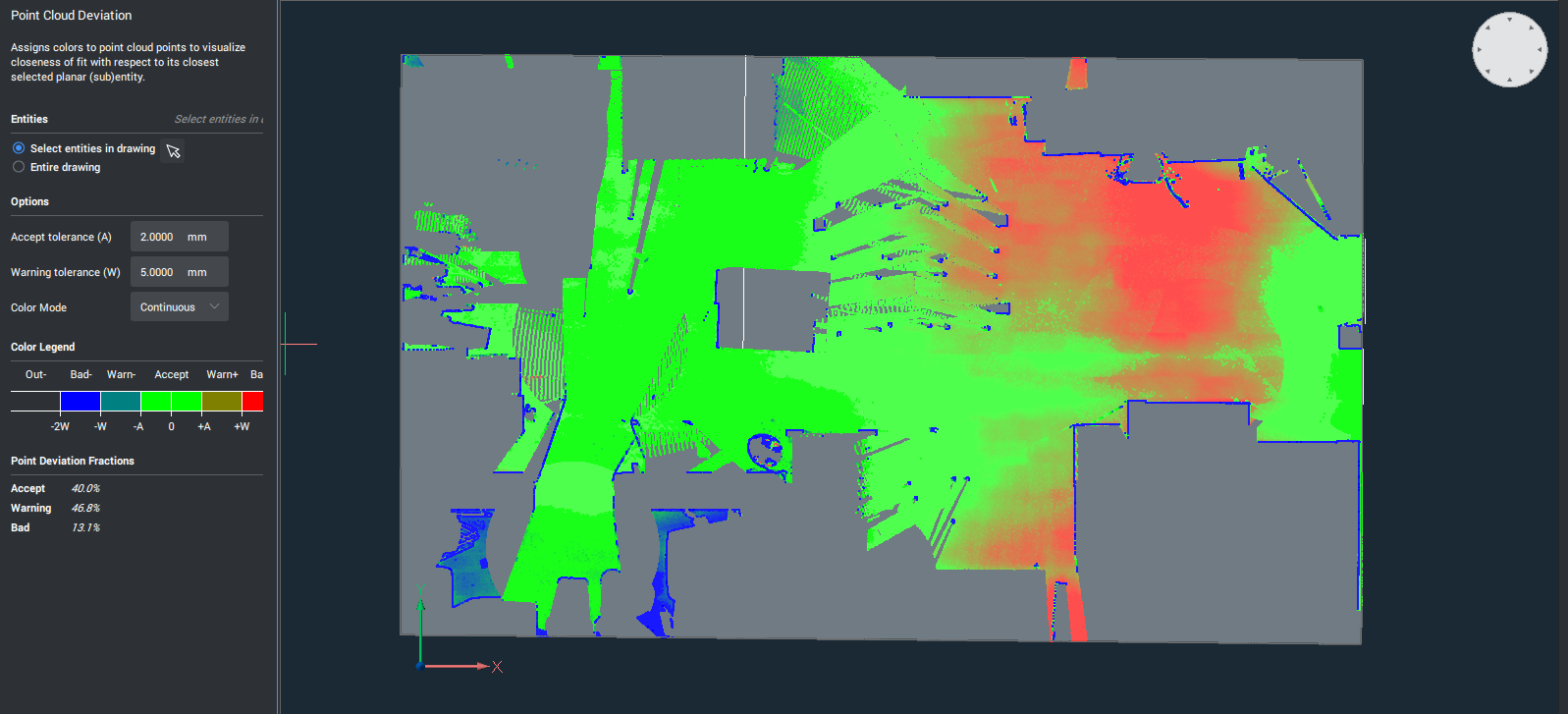
Odległości punktów od podłogi do płaszczyzny dopasowania są wizualizowane za pomocą mapy kolorów. W lewym panelu znajduje się wyjaśnienie kolorów (zielony jest płaski, gradient od zielonego do niebieskiego jest dalej nad płaszczyzną, gradient od zielonego do czerwonego znajduje się dalej poniżej płaszczyzny). Również podsumowanie procentów punktów, w których prezentowana jest kategoria (OK, poziom ostrzegawczy, ...)