POINTCLOUDCLASSIFY command
Assigns classes to each point in a point cloud.

Icon: 
Requirements
- The Point Cloud Classifier runs on Windows only.
- Your system's GPU needs to be CUDA compatible.Important: In BricsCAD V25, the classifier does not support NVIDIA’s Blackwell architecture GPUs.Note: You can check if your GPU is CUDA compatible here.
- Make sure that the latest NVIDIA driver is installed and running.
Preparing the classifier libraries
- Download the classifier libraries from here.
- Unzip the archive.
- Copy the content of the folder to the BricsCAD installation folder:
- Select all the DLL files and the UserDataCache folder inside the classifier libraries, then drag and drop these over the installation folder. All the DLL files will be copied, and the UserDataCache folder will be updated, with the PCC models folder copied inside it.
- Alternatively, you can first copy and paste all the DLL files inside the classifier libraries to the installation folder, then copy and paste the PCC models folder to the UserDataCache folder inside the installation folder.
The BricsCAD installation folder's default path is: C:\Program Files\Bricsys\BricsCAD V25 en_US.
Important: You need to re-run BricsCAD after you copy the classifier libraries.
If all the above requirements are met and libraries correctly copied, the POINTCLOUDCLASSIFY command will run the classifier.
Method
When the command is called and the model is selected, the classifier will run in the background and the results will appear in the Point Cloud Manager panel when ready.
Note: Use the POINTCLOUDMANAGERPANELOPEN command to open the Point Cloud Manager panel.
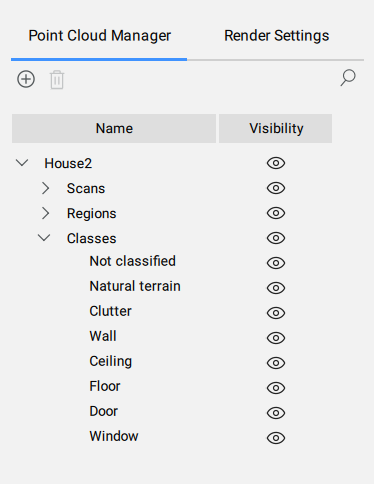
There are 4 different models to use with the classifier:
- indoorBasic: 10 basic classes for indoor scans (walls, ceiling, floor, windows, doors, clutter, etc.).
- indoorSimplified: model with 20 classes for indoor scans (basic classes + Inclined roof, Roof Equipment, Steel structure, Railing, etc.).
- indoorFull: model with 40 classes for indoor scans (simplified classes + Pipe installation, Wire installation, Radiator, Plumbing, etc.).
- Outdoor: model with 5 classes for outdoor scans (Terrain, Vegetation, Building, Paved road - hardscape, Noise).
- Roads (starting with V25.2.03): model with 30 classes, used for classification of point clouds typically captured via a scanner installed on a car (Vegetation, Buildings, Road surface, Curbstone, Guard rails, Sign posts, Vehicles, etc.)
- Construction (starting with V25.2.03): model with 15 classes, used for classification of point clouds captured from a construction site (Vegetation, Building, Road and hardscape, Fencing, Construction material, Trenching, etc.)
Note: For indoor models, the results will be more accurate if room information is available. To obtain room information, follow these steps:
- Run the POINTCLOUDDETECTFLOORS command to detect the floors in the point cloud. The detected floors are listed in the Point Cloud Manager panel under Building.
- (Optional) To edit the selection of points assigned to a floor, right-click the floor listed in the Point Cloud Manager panel and select the Modify option from the context-menu (see also the POINTCLOUDMODIFYFLOOR command article).
- Run the POINTCLOUDDETECTROOMS command to detect rooms in the selected floor/s. The results will appear under Building in the Point Cloud Manager panel.
Options within the command
- Select model
- Allows you to select one of the classification models.
- Select classification mode
- Allows you to select the preset configuration for the classifier.