Trabalhar com Nuvens de Pontos
Pré-processamento
Para pré-processar uma Nuvem de pontos, use o comando NUVEMPONTOSREFERENCIA para abrir a caixa de diálogo Gerenciador Referência de Nuvem de Pontos e selecione Pré-processar nova varredura. Você também pode usar o comando ANEXARNUVEMPONTOS.
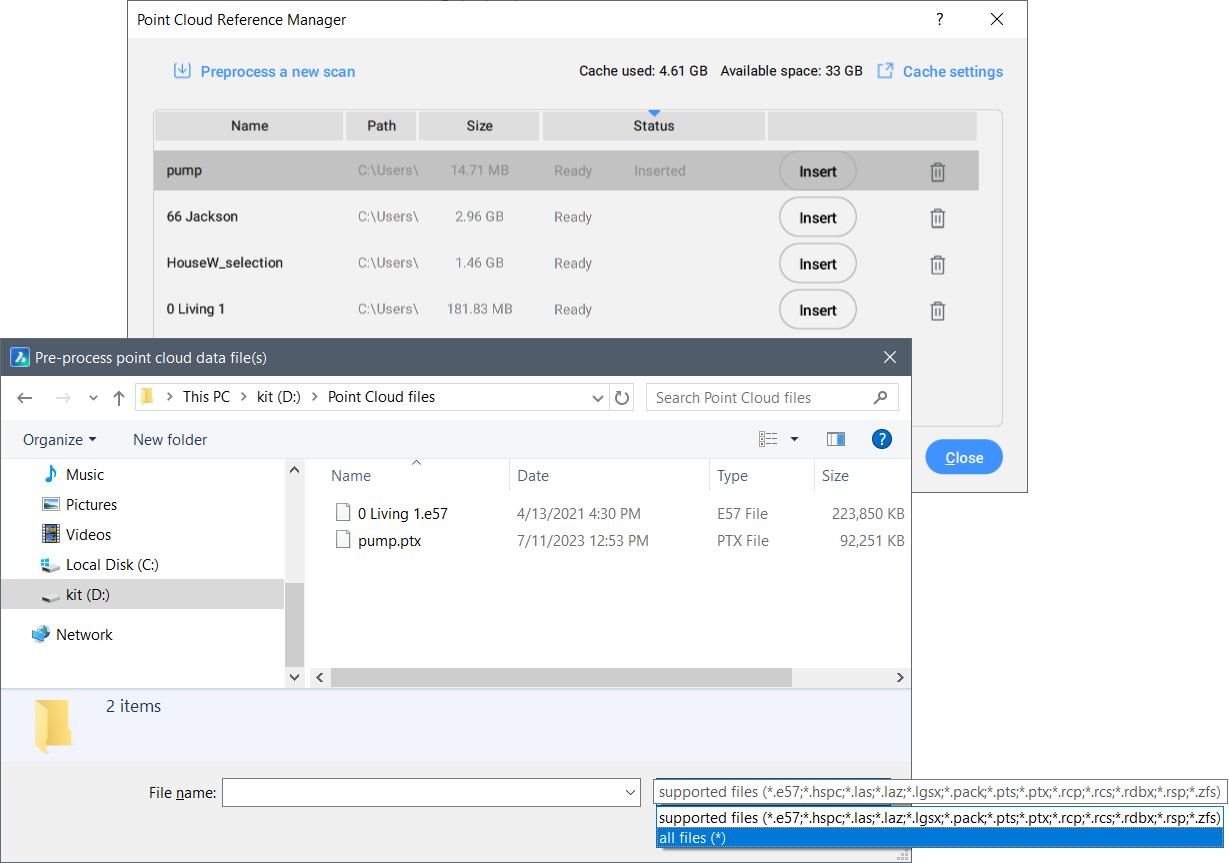
A progressão do pré-processamento é registrada em um arquivo log (registro) que fica na subpasta relacionada com a Nuvem de pontos. Esta subpasta está localizada dentro do caminho atual do cache de Nuvens de pontos. O caminho predefinido para o cache de Nuvem de pontos atual é C:\Users\%username%\AppData\Roaming\Bricsys\BricsCAD\V25x64\en_US\PointCloudCache\Folder_for_processed_pointcloud, e pode ser ajustado na variável de sistema POINTCLOUDCACHEFOLDER.
Alinhamento
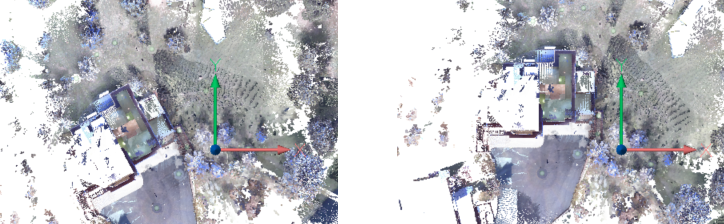
O comando NUVEMPONTOSALINHAR faz rotacionar automaticamente uma nuvem de pontos, para alinhá-la de forma ideal com os eixos X e Y, levando em conta as superfícies planas verticais na nuvem de pontos (ex., paredes). Para determinar o melhor alinhamento, você é solicitado a especificar a área mais relevante da nuvem de pontos que contém paredes.
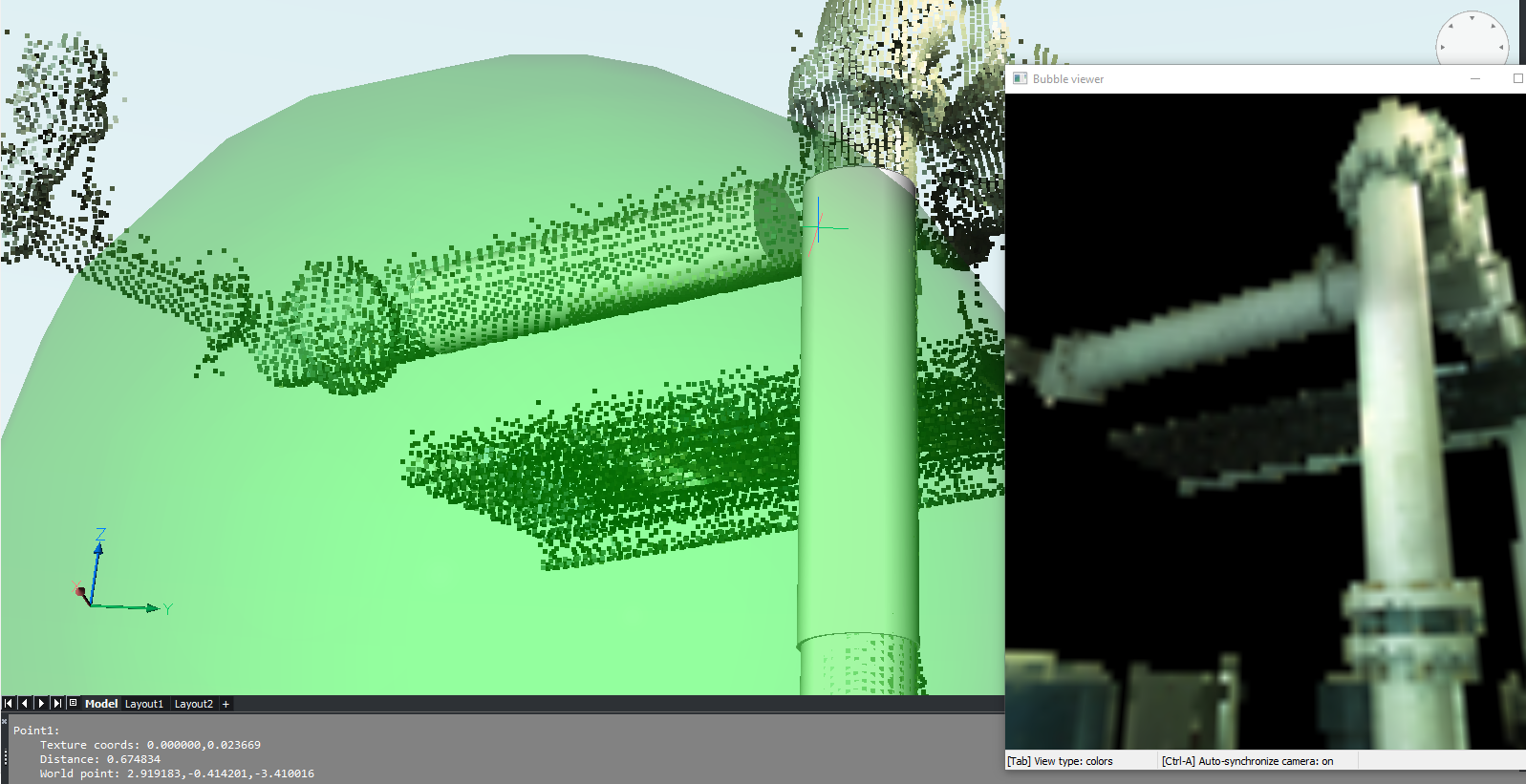
Visualizador de Bolha
Dependendo do formato de arquivo original da nuvem de pontos e do tipo de scanner usado durante a varredura (estática ou cinemática), as bolhas (esferas verdes) ou pontos de referência (esferas azuis) podem ser mostrados em todos os locais da digitalização. Nesses locais, você vai experimentar as representações visuais mais realistas, abrindo o Visualizador de Bolha.
Dados estruturados são capturados usando um scanner estático. Nesse caso, o local do scanner é conhecido, para cada ponto. Bolhas verdes são criadas nos locais do scanner estático a partir dos pontos digitalizados.
Dados não-estruturados são capturados usando um scanner cinemático. Nesse caso, não há um local exato de onde os pontos foram escaneados (varridos). Alguns dos scanners cinemáticos criam imagens panorâmicas em intervalos de tempo. Para essas imagens, a localização é conhecida e os pontos de referência (esferas azuis) são criados.
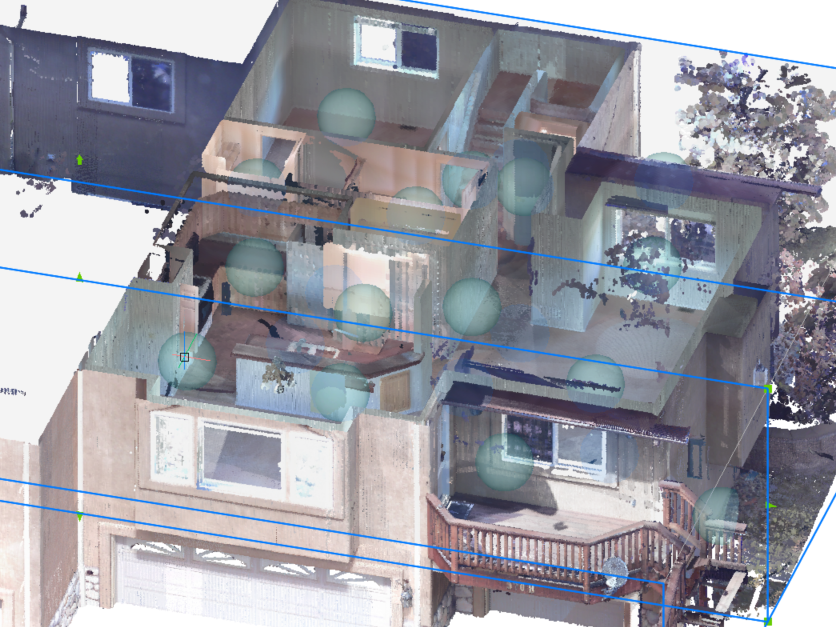
Indique um índice de bolhas no comando NUVEMPONTOSVISUALIZADORBOLHA ou clique duas vezes em uma das bolhas no Model Space para abrir o Visualizador de Bolha.
Você pode pressionar o botão médio e mover o mouse para ver a Nuvem de pontos em qualquer direção, a partir daquele local de digitalização.
Aumente e diminua o Zoom, usando a rodinha do mouse.


As escanerizações próximas são indicadas no Visualizador de Bolha por bolhas vermelhas. Passe o cursor sobre uma bolha para exibir o nome do escaneamento. Clique duas vezes em uma bolha para abrir a varredura no visualizador.

-
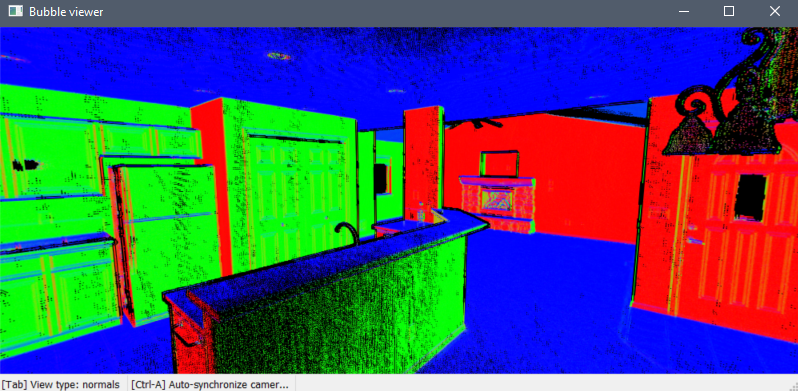
Os modos de cores e cores (profundidade) exibem os pontos como suas cores reais ou em escala de cinza, dependendo de como os dados foram digitalizados.
-
O modo das normais exibe os pontos em vermelho, verde ou azul de acordo com seus vetores normais. As cores correspondem aos eixos do UCS.
-
O modo de distâncias exibe os pontos do claro ao escuro à medida que a distância do local da varredura aumenta.
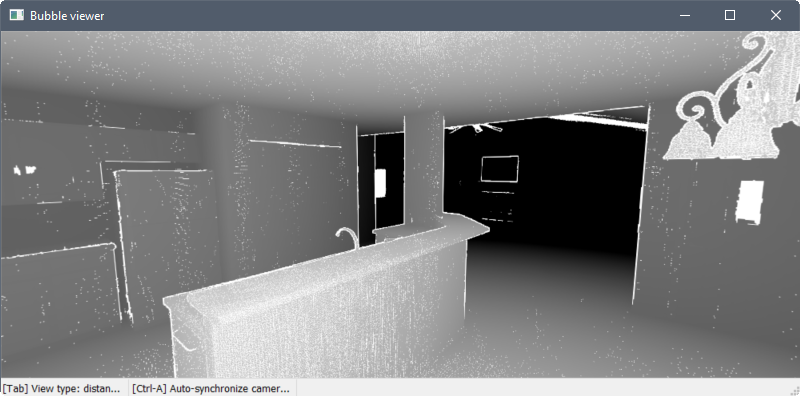
Sincronize a vista do desenho para coincidir com o Visualizador de Bolha pressionando Ctrl+A.

Snaps de entidade
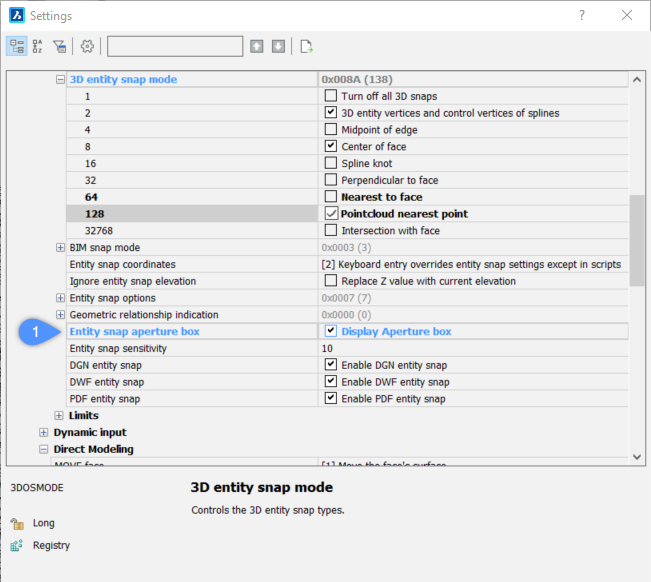
O snap da entidade de Ponto mais próxima da NuvemPontos (comando PCNEAREST/variável de sistema 3DOSMode) melhora significativamente a capacidade de selecionar pontos relevantes da Nuvem de pontos. Este usa um cilindro imaginário a partir do ponto de vista atual, em direção ao cursor.
O raio do cilindro imaginário é definido pela configuração Entity snap aperture box (variável de sistema APBOX) (1).
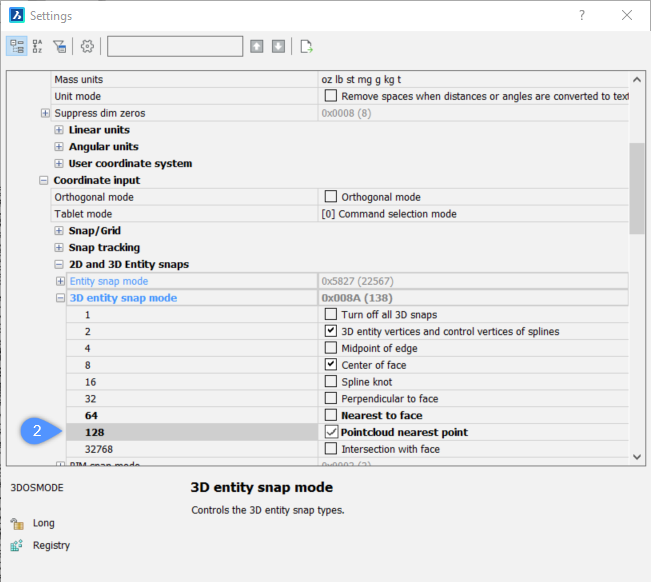
Ative o snap a entidade Ponto mais próximo em Nuvem de pontos (2) junto com outros snaps a entidade 3D nos menus, barra de ferramentas e configurações de Snap a entidade.
Exportar
O comando NUVEMPONTOSEXPORTAR permite exportar as partes visíveis de uma nuvem de pontos para um arquivo *.PTS, *.HSPC, ou *.LAZ.
Detecção de Piso
O comando NUVEMPONTOSDETECTARPISOS detecta pisos em uma Nuvem de pontos de um edifício. A detecção é baseada em regiões de pontos com coordenadas-Z semelhantes. Os pisos detectados podem ajudar na navegação em Nuvens de pontos de edifícios.
Projeção de Nuvem de pontos
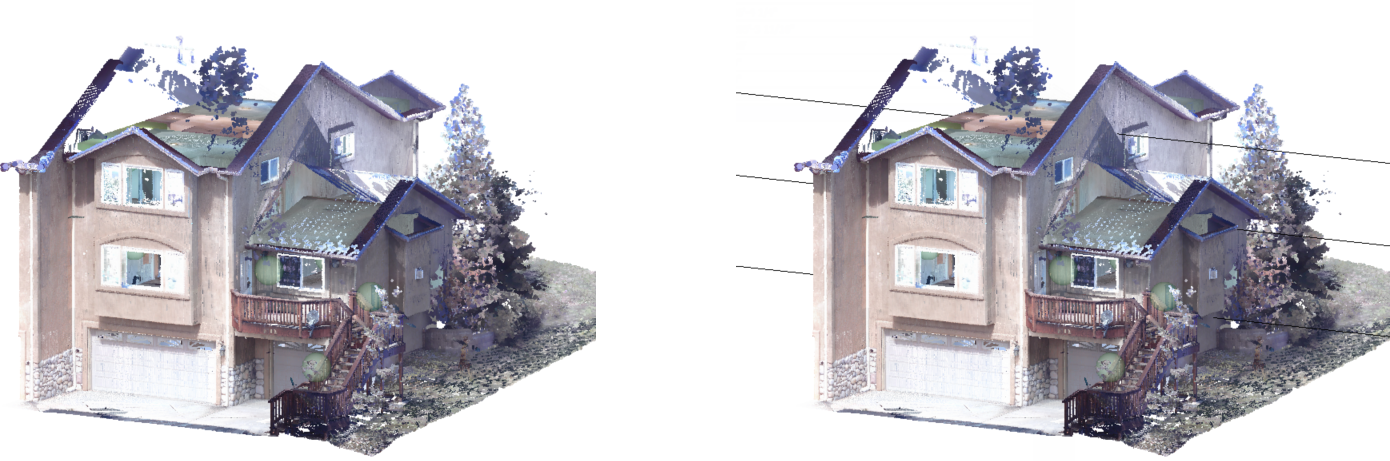
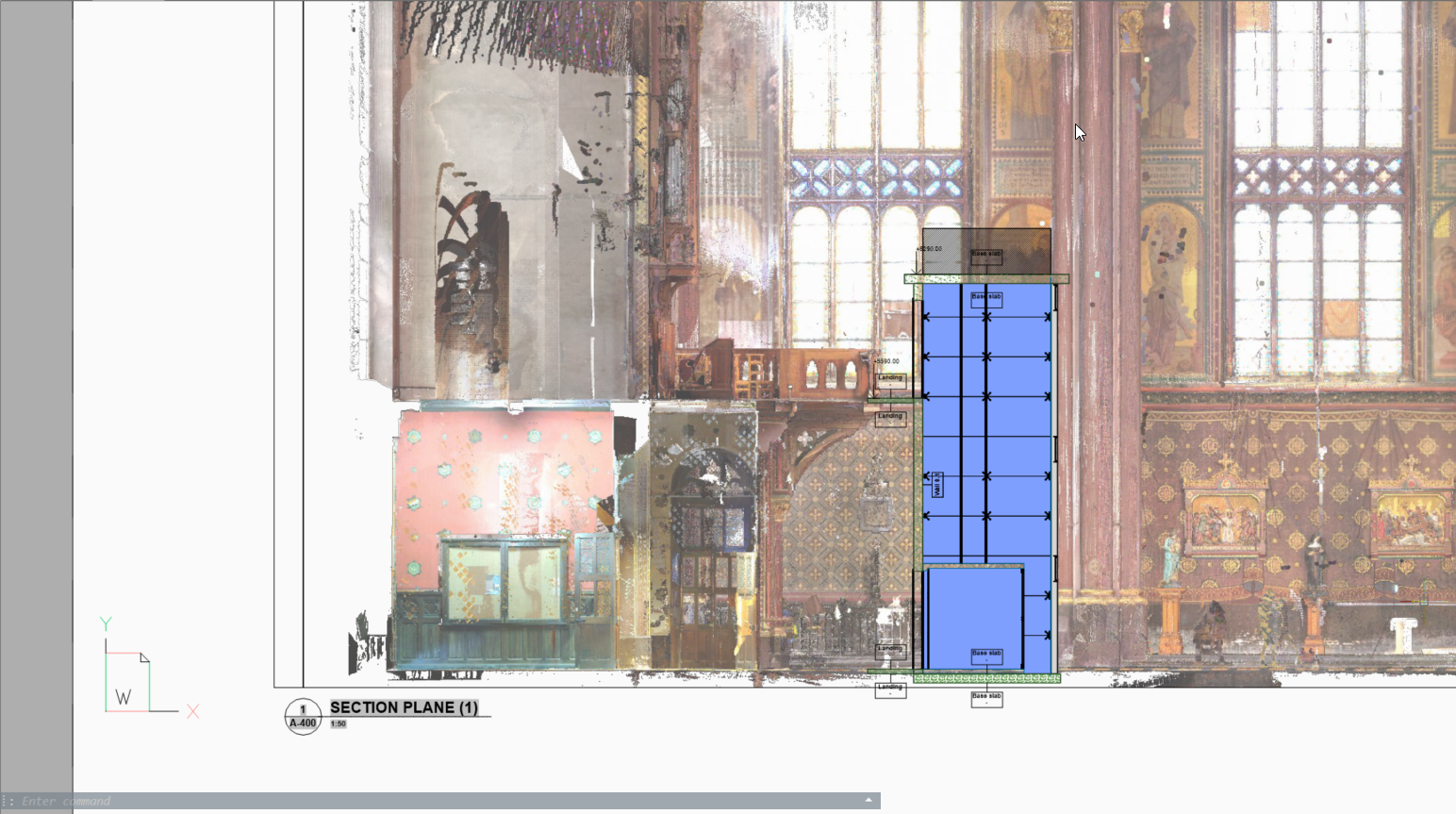
O novo comando NUVEMPONTOSPROJETARCORTE permite detectar paredes a partir do Corte de Volume de uma Nuvem de pontos, com base em uma variedade de Opções de detecção de parede. Você pode criar Cortes de Volume com o comando BIMCORTE. Você pode usar esses cortes para gerar linhas 2D, para criar uma planta 2D ou um corte vertical. Este é um processo em Segundo plano e múltiplos cortes podem ser processados em uma fila de trabalhos. Desta forma, é possível executar este comando em resolução completa, em todos os cortes.
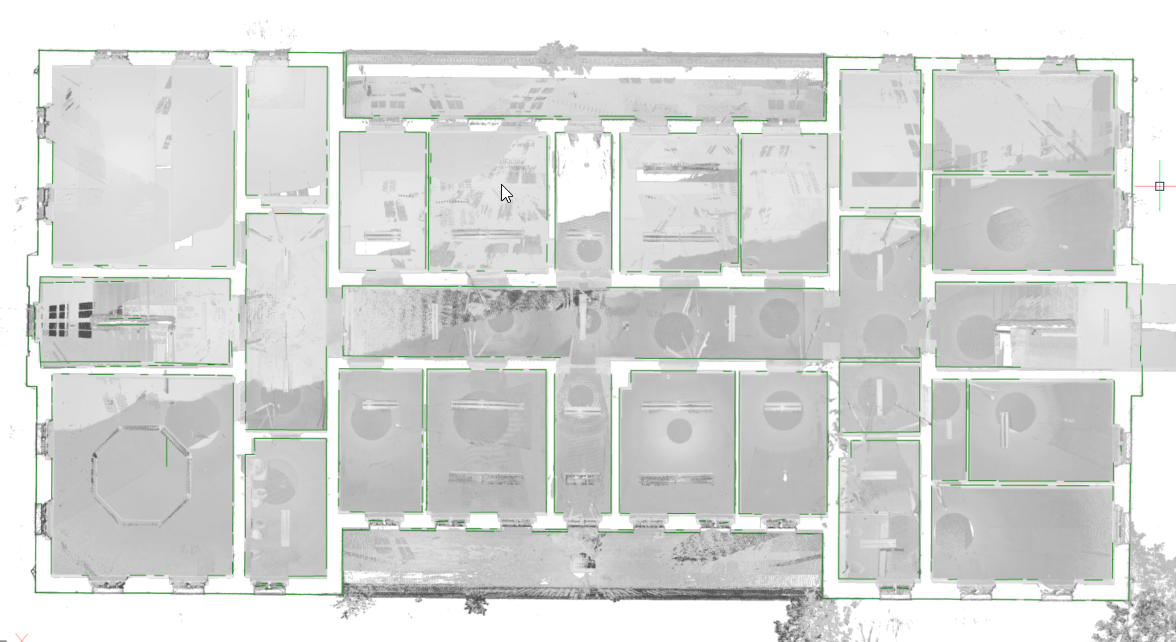
Ao mesmo tempo, uma imagem raster é gerada para dar ao usuário algum contexto. Em alguns casos, não é necessário recriar com sólidos o edifício existente. Imagens de fundo podem fornecer muito mais contexto para os documentos do projeto. Essas podem ser usadas para verificar a geometria 2D criada, mas em escanerizações de alta qualidade, essas imagens também podem ser usadas como material gráfico. Por exemplo, como uma imagem de fundo para um modelo BIM em projetos de renovação em edifícios históricos, onde uma intervenção moderna está sendo feita.
Ajustar Plano
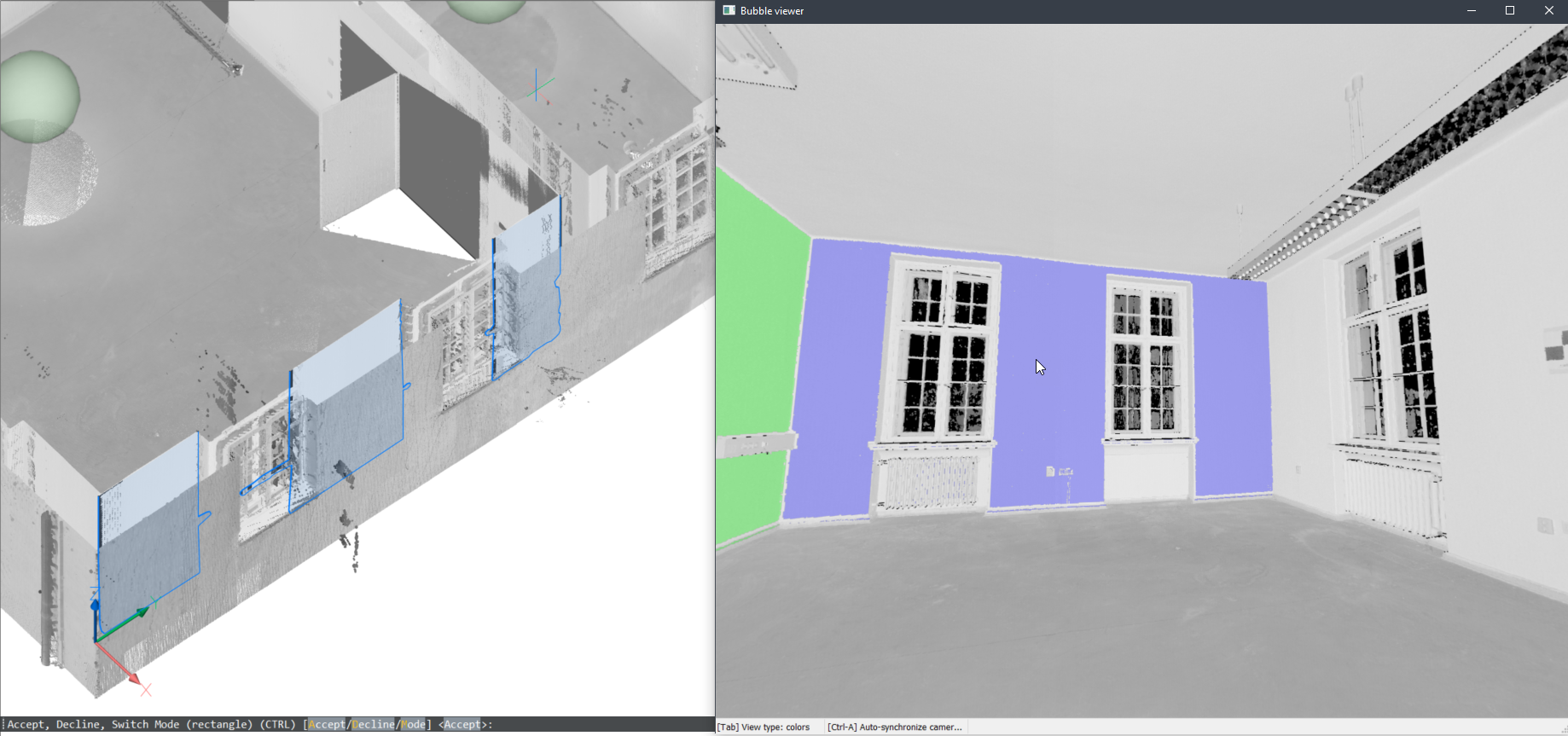
O novo comando NUVEMPONTOSAJUSTARPLANO permite a você criar geometria 3D com base na Nuvem de pontos. Este vai criar uma superfície planar ou um sólido, após selecionar um ponto de origem (seed point) em uma nuvem de pontos. Para detectar os pontos que se encontram no mesmo plano que o ponto inicial, é utilizado um valor de limiar que pode ser definido como uma propriedade da entidade de Nuvem de pontos. Mantendo pressionado o botão Shift e selecionando as paredes adjacentes de uma sala, os planos ajustados serão estendidos/aparados para formar uma superfície fechada.
- A seleção de aberturas permite levar em conta as aberturas de portas e janelas (somente no Visualizador de Bolha).
- Ajustar Margens permite ajustar o contorno da borda planar.
- Costurar Superfícies fornece um resultado de vedação entre os vários planos ajustados, por exemplo, em um sólido, que posteriormente pode ser usado com o comando BIMINVERTERESPACOS.
- Na vista da bolha
-
Se o Visualizador de Bolha estiver aberto quando o comando for iniciado, BricsCAD espera que você selecione os pontos iniciais (seed points) do plano dentro do Visualizador de Bolha. O cursor fornece uma vista prévia da direção normal do plano. A seguir, você obtém uma prévia em ambos, o Visualizador de Bolha e a vista do modelo. Você pode alternar entre as duas representações de forma (shape) usando a tecla Ctrl.
Nota: Enquanto ainda está no modo de seleção, os pontos correspondentes na bolha são mostrados em roxo. Esses pontos são mostrados em verde quando o usuário aceita o resultado gerado.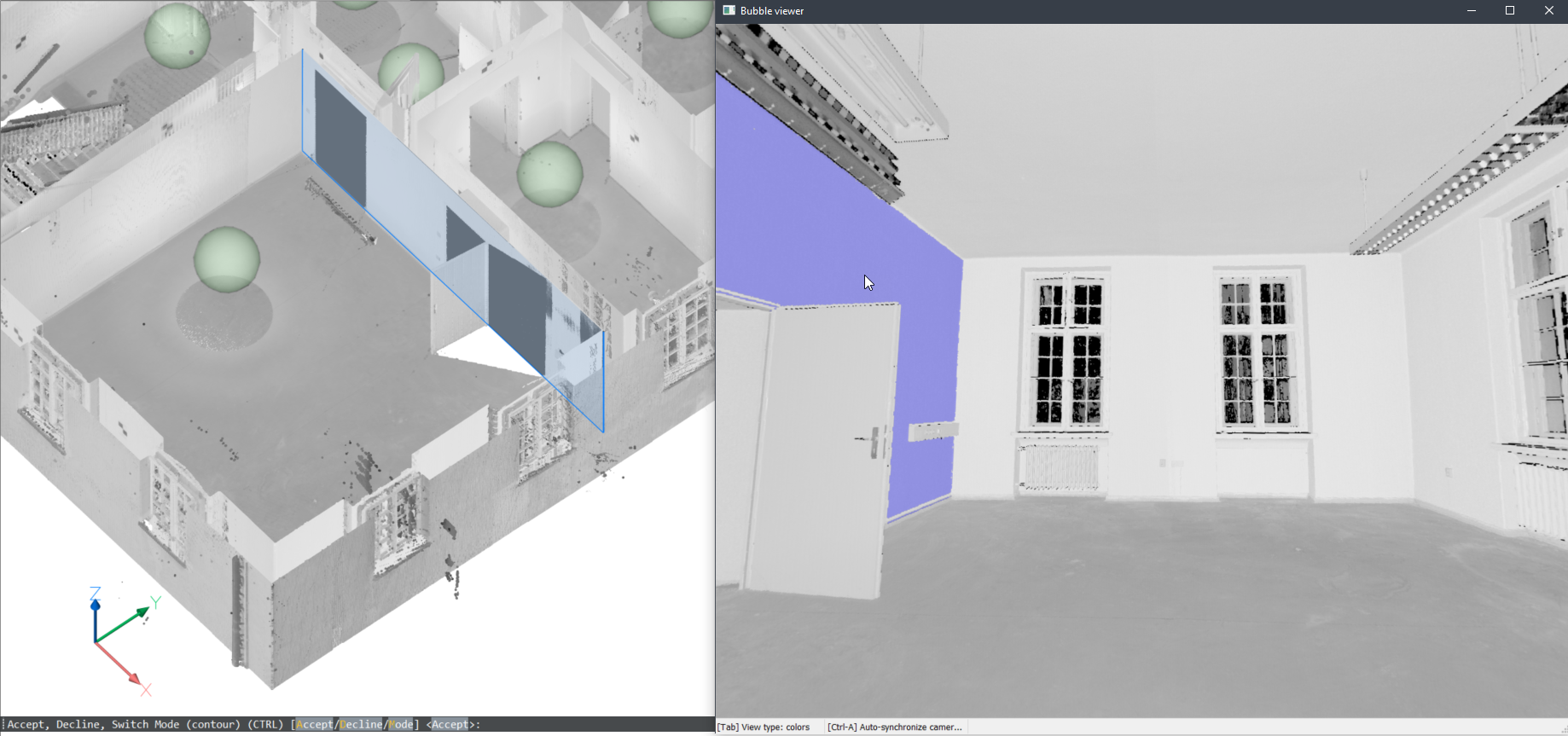
- No Model Space
- Você também pode usar esse comando no Model Space quando o Visualizador de Bolha não estiver aberto. BricsCAD vai pedir que você selecione um ponto da Nuvem de pontos, no Model Space. Dependendo do tamanho das partes visíveis da Nuvem de pontos, isto pode levar mais tempo em comparação com a execução do comando dentro do Visualizador de Bolha. No entanto, tem duas vantagens ao pesquisar em múltiplas posições de varredura:
- Este pode criar superfícies maiores combinando partes de diferentes varreduras.
- E pode detectar a espessura das paredes e da laje.
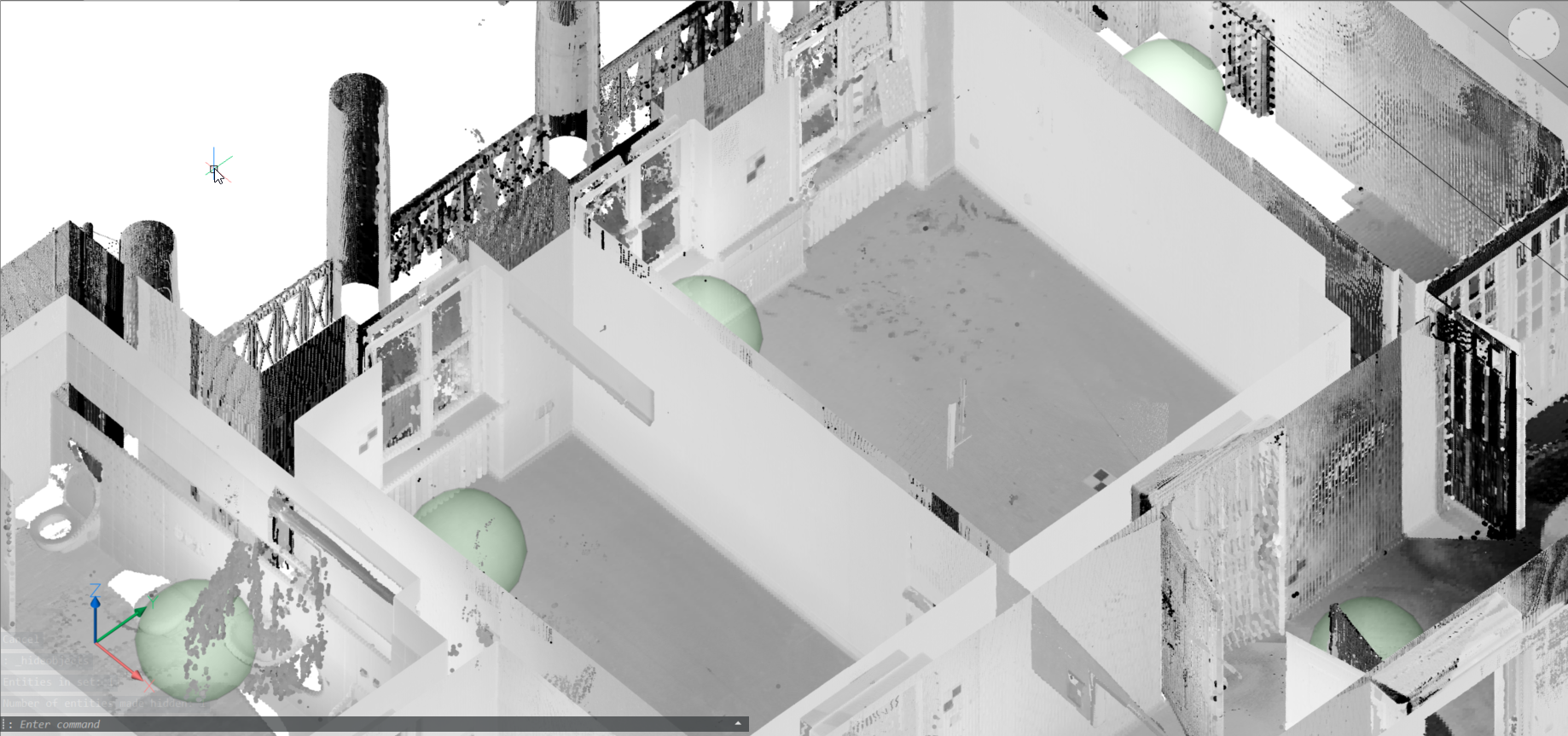
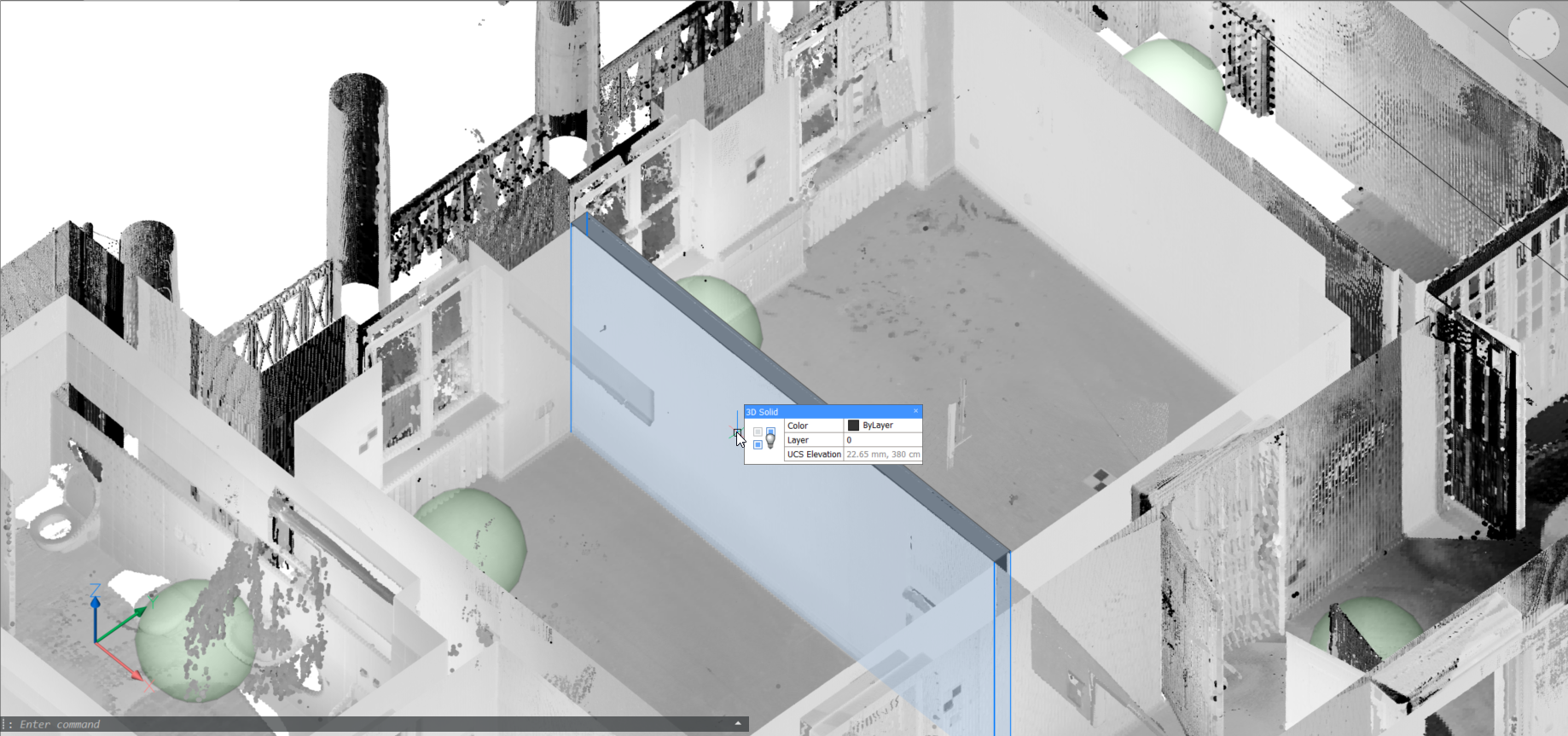
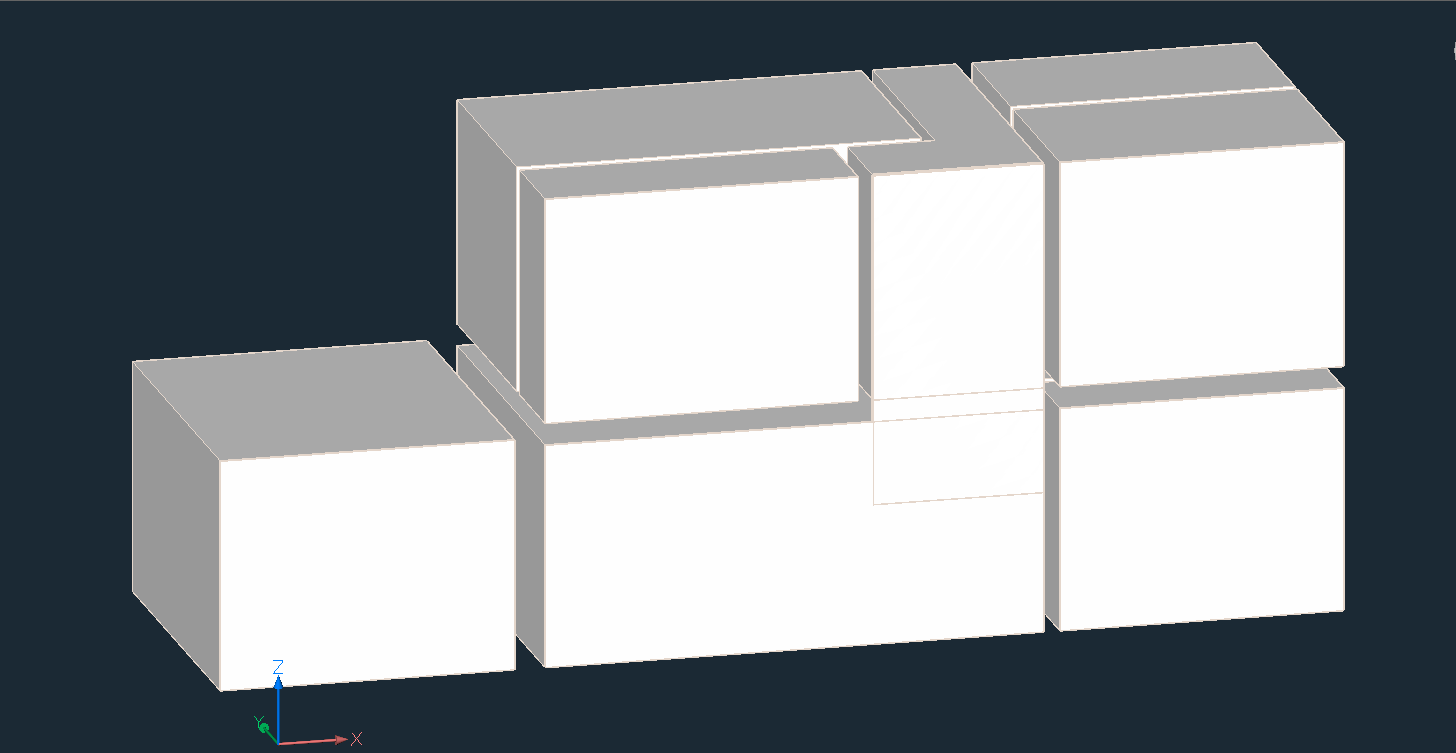
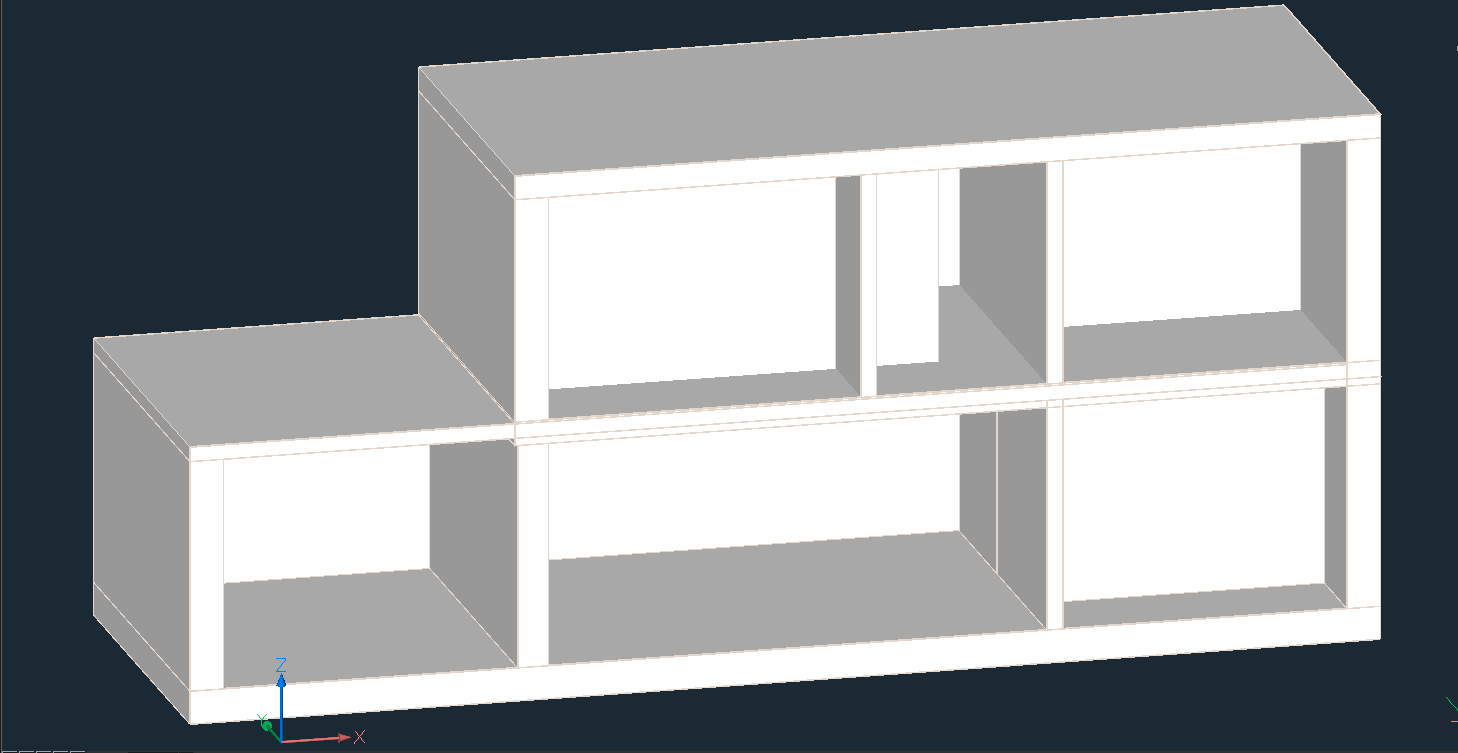
Nota: Aqui, é fornecido um fluxo de trabalho de conversão de um modelo de scan varredura em modelo de construção. A nuvem de pontos (imagem superior) é primeiramente convertida em um conjunto de sólidos, um por espaço, usando os resultados do POINTCLOUDFITPLANAR costurado (imagem do meio). O comando BIMINVERTERESPACOS converte esses sólidos temporários de espaço em um modelo de construção com paredes e lajes a partir da inversão desses sólidos.
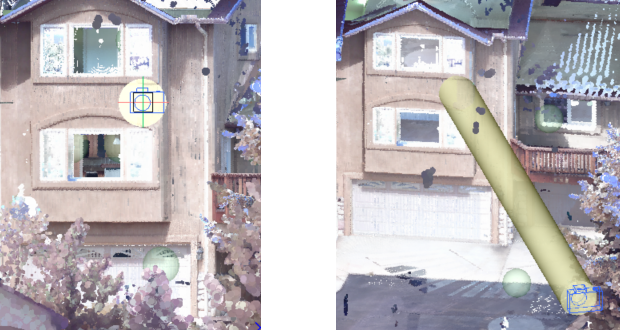
Ajustar cilindro em bolhas
Ao usar o comando NUVEMPONTOSAJUSTACILINDRO dentro do Visualizador de Bolha, você pode ajustar um cilindro às partes cilíndricas de uma nuvem de pontos (ex., tubos) Dois cliques ao longo do eixo do cilindro no Visualizador de Bolha são necessários para extrair um cilindro (um sólido é criado na vista do modelo).
NUVEMPONTOSDESVIO
- O comando NUVEMPONTOSDESVIO permite avaliar visualmente o ajuste entre estruturas planares e pontos da Nuvem de pontos.

- Corte de Nuvem de pontos do piso de uma casa e um plano ajustado:
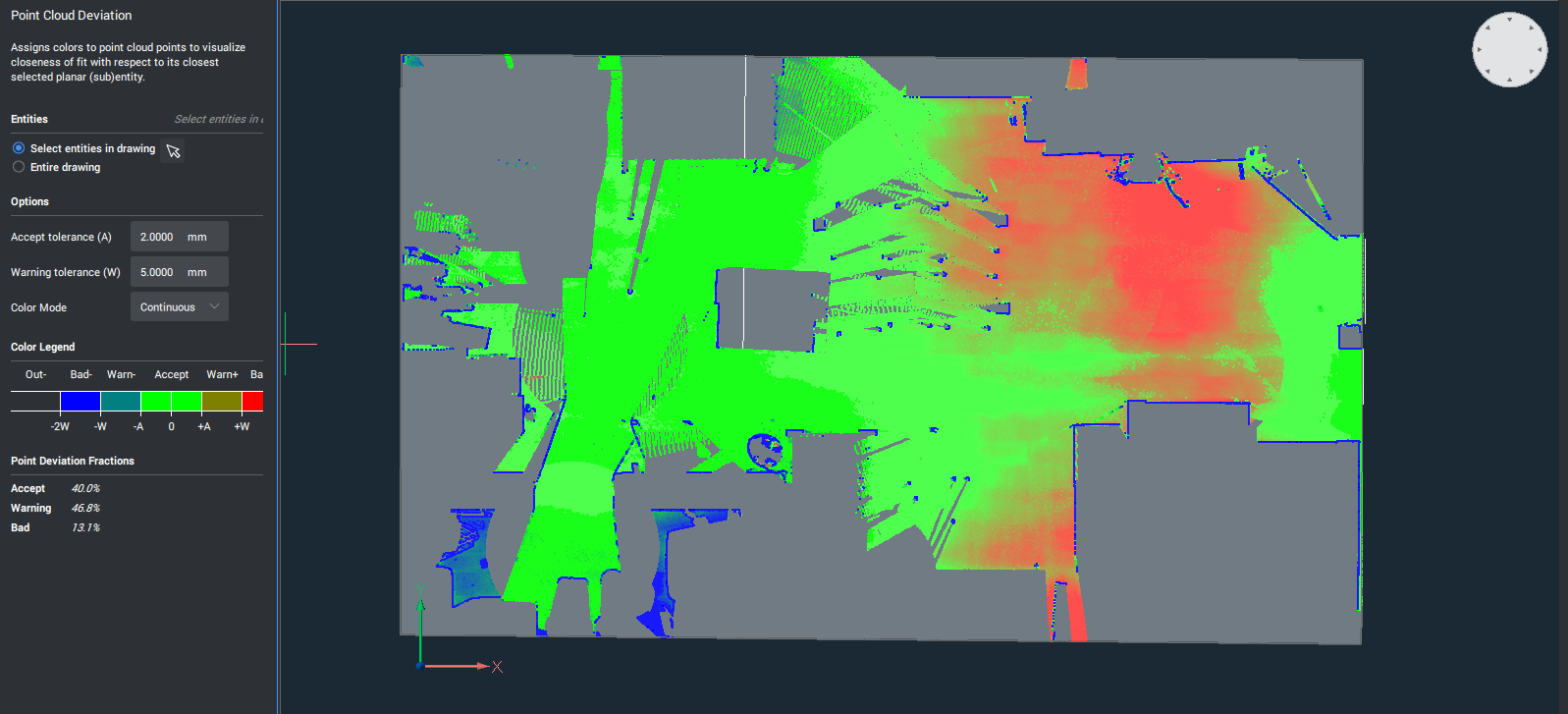
As distâncias dos pontos do chão até o plano ajustado são visualizadas usando um mapa de cores. No painel à esquerda, uma explicação das cores é fornecida (aqui o verde é o plano, o gradiente de verde para azul está acima do plano, e o gradiente de verde para vermelho está abaixo do plano). Além disso, um resumo das percentagens de pontos em que a categoria é apresentada (OK, nível de aviso,...)